Alignement
La registration ou alignement est essentiellement le processus d'alignement des images d'une séquence pour pouvoir les traiter par la suite. Tous les processus décrits ci-après calculent la transformation à appliquer à chaque image afin d'être alignée avec l'image de référence de la séquence.
La force de Siril réside dans la grande variété d'algorithmes d'alignement proposés. Chaque méthode est expliquée ci-dessous. L'appui sur le bouton Aligner lance l'alignement de la séquence.
Il est possible de choisir le canal d'alignement. Le vert est le canal par défaut pour les images en couleur, la luminance pour les monochromes. Le signe (*) apparaissant après le nom du canal signifie que des données d'alignement sont déjà disponibles pour ce canal. Lors du traitement des images, les données d'alignement sont extraites du canal par défaut s'il est disponible (pour les images RVB : Vert, sinon retour au Bleu puis au Rouge).
Théorie
Processus d'alignement
Ce que nous appelons Alignement est en fait un processus en trois étapes :
Détecter les caractéristiques à faire correspondre dans toutes les images
Calculer les transformations entre chaque image et l'image de référence
Appliquer la transformation calculée à chaque image pour obtenir de nouvelles images
Selon la méthode d'alignement choisie, les 3 étapes se déroulent (ou non) en un seul processus. Siril utilise les valeurs par défaut les plus raisonnables (choisir d'appliquer ou non la transformation calculée) en fonction de la méthode d'alignement sélectionnée, mais la compréhension de la machinerie interne peut vous aider à modifier ce comportement pour mieux répondre à vos besoins.
Algorithmes
Le tableau ci-dessous détaille les différents algorithmes utilisés pour les 2 premières étapes (détection et calcul de la transformation).
Méthode d'alignement |
Détection des caractéristiques |
Calcul de la transformation |
Nouvelle séquence |
|---|---|---|---|
Global |
Correspondance des triangles + RANSAC |
Y |
|
Global avec 2 passe |
N |
||
1-2-3 étoiles |
PSF minimisation dans la boîte de sélection |
Décomposition en valeur singulière (2-3 étoiles) Différence (1 étoile) |
N |
Alignement par motif de l'image |
correlation croisée avec boîte de sélection |
N |
|
KOMBAT |
Max de convolution dans le domaine spatial dans la boîte de sélection |
N |
|
Comète |
PSF minimisation dans la boîte de sélection |
Décalages du vecteur vitesse à l'aide d'horodatages |
Y(*) |
Multipoint |
Alignement multipoint par éléments pour vidéos planétaires |
Descente parabolique à chaque AP |
N |
Manuelle |
Vos yeux |
Vos mains |
N |
Astrométrie |
À partir de la solution astrométrique |
N |
|
Note
(*) L'alignement de comète crée un nouveau fichier de séquence (avec le préfixe comet_ par défaut) et crée de « nouvelles » images. Si des données d'alignement étaient présentes dans la séquence d'entrée, les décalages de la comète sont composés avec ces données d'alignement préexistantes. Les « nouvelles » images créées sont simplement des liens symboliques vers les images d'entrée, afin de ne pas consommer d'espace de stockage supplémentaire. Ce changement introduit dans la version 1.4 a été effectué pour clarifier si une séquence contenant des données d'alignement n'avait qu'un alignement sur les étoiles ou un alignement étoiles+décalage de comète. L'exportation d'une nouvelle séquence rend désormais évident le fait que des décalages supplémentaires sont inclus. Cela permet également d'utiliser la même séquence d'entrée et de générer plusieurs séquences alignées sur différents objets en mouvement.
Le tableau ci-dessous répertorie les transformations compatibles avec chaque méthode, ainsi que la disponibilité de la correction de distorsion.
Méthode d'alignement |
Translation |
Euclidien |
Similarité |
Affine |
Homographie |
Annuler la distorsion |
Décalage local |
|---|---|---|---|---|---|---|---|
Global |
sous-pixel |
x |
x |
x |
x |
||
2 passes |
sous-pixel |
x |
x |
x |
x |
||
1-2-3 étoiles |
sous-pixel (1-2-3) |
(2-3) |
|||||
Alignement par motif de l'image |
pixel |
||||||
KOMBAT |
pixel |
||||||
Comète |
sous-pixel |
||||||
Multipoint |
sous-pixel |
x |
|||||
Manuelle |
pixel |
||||||
Astrométrie |
x |
x |
Il est également important de garder à l'esprit comment la séquence alignée est introduite dans le processus d'empilement qui est généralement utilisé juste après l'alignement :
si la transformation consiste uniquement en des décalages de pixels, l'algorithme d'empilement peut utiliser ces décalages à la volée lors de la lecture des images. Cela signifie qu'il n'est pas nécessaire de générer des "images alignées". Cela permet de gagner de l'espace de stockage et d'éviter l'interpolation. C'est, bien sûr, au détriment d'un alignement moins précis (c'est-à-dire d'une précision inférieure au pixel) mais c'est généralement utilisé sur des images planétaires/de chance où l'échantillonnage est faible. Cette méthode peut également être appliquée avec une méthode d'alignement qui calcule les décalages sous-pixel. Au cours du processus d'empilement, les décalages seront arrondis à la précision du pixel. Dans tout autre cas, c'est-à-dire lorsque l'empilement est alimenté par une séquence où l'alignement a calculé des transformations plus complexes que de simples décalages mais que les images alignées n'ont pas été sauvegardées, Siril émettra un avertissement vous invitant à exporter les images alignées avant de procéder à l'empilement.
Dans tous les autres cas, une fois les transformations calculées, les images transformées doivent être sauvegardées avant de procéder à l'empilement, généralement nommées avec le préfixe
r_.
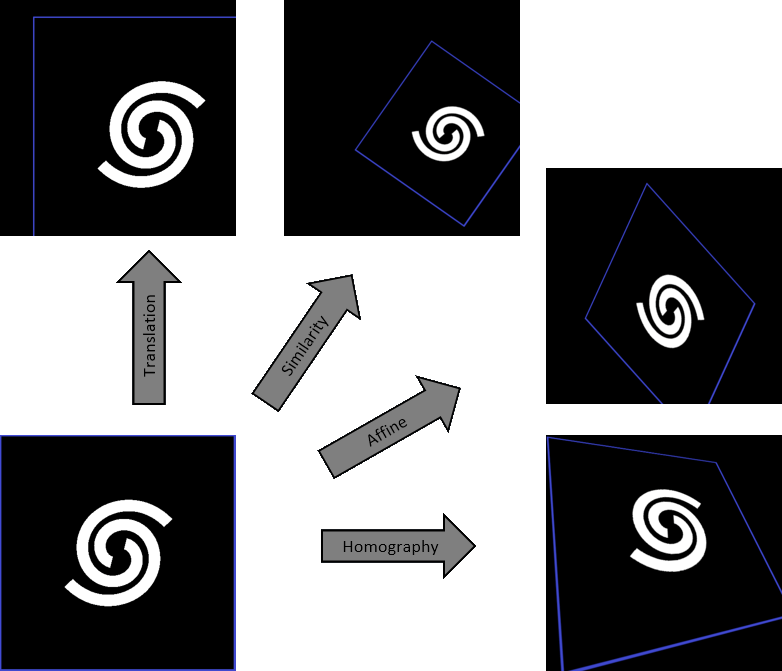
Transformations de l'image
Transformation linéaire
Siril utilise des transformations linéaires, avec différents degrés de liberté, pour mettre en correspondance une image avec l'image de référence :
Translation est un mapping rigide à 2 degrés de liberté (décalages x/y), bien adapté aux images sans distorsion, sans mise à l'échelle et sans rotation de champ. Il ne nécessite qu'une seule paire d'étoiles (ou de caractéristiques) à faire correspondre pour définir la transformation.
Euclidien est un mapping rigide à 3 degrés de liberté (déplacements x/y + une rotation), pour des images sans distorsion, sans mise à l'échelle. Il faut qu'au moins 2 paires d'étoiles soient appariées pour définir la transformation.
Similarité est un mapping à 4 degrés de liberté (une échelle, une rotation et des décalages x/y) plus rigide que l'homographie, bien adaptée aux images sans distorsion. Il faut qu'au moins 2 paires d'étoiles soient appariées pour définir la transformation.
Affine est un mapping à 6 degrés de liberté (deux échelles, un cisaillement, une rotation et des décalages x/y) plus rigide que l'homographie, bien adapté aux images avec peu de distorsion. Elle nécessite la mise en correspondance d'au moins 3 paires d'étoiles pour définir la transformation.
Homographie est la transformation par défaut qui utilise une transformation à 8 degrés de liberté pour déformer les images sur le cadre de référence. Cette transformation est bien adaptée au cas général et fortement recommandée pour les images à grand champ. Elle nécessite la mise en correspondance d'au moins 4 paires d'étoiles pour définir la transformation.
Distorsions
Depuis la version 1.3, Siril peut également tenir compte des distorsions, pour certaines des méthodes d'alignement listées dans ce tableau. Les coefficients de distorsion gérés par Siril suivent la convention SIP. Cette convention suppose que les coordonnées de pixels doivent être corrigées AVANT d'essayer de les projeter via une transformation linéaire. Dans le jargon WCS, on appelle cela une distorsion a priori (par opposition à une distorsion séquente).
Ces coefficients sont utilisés deux fois pendant le processus d'alignement :
les positions des étoiles détectées en conditions « distordues » sont d'abord corrigées, à la fois dans l'image à aligner et dans l'image de référence (ou les positions projetées des étoiles pour l'alignement astrométrique). La transformation linéaire qui projette les étoiles de l'image actuelle sur la référence est ensuite calculée.
Lors de l'exportation de l'image alignée, celle-ci est d'abord corrigée de sa distorsion puis projetée linéairement pour être alignée sur l'image de référence. Notez que cela se produit en réalité en une seule opération (la projection des pixels est calculée comme la composition de cette correction non linéaire suivie de la projection linéaire) afin d'éviter d'interpoler les valeurs de pixels deux fois. L'image de référence subit également cette correction, sans la projection linéaire.
Image de référence
C'est l'image qui est utilisée comme référence commune pour calculer les transformations qui envoient toutes les images de la séquence sur cette image particulière.
Si elle n'est pas définie manuellement, l'image de référence est choisie selon les critères suivants :
si la séquence a déjà été alignée, il s'agit de la meilleure image, en termes de FWHM la plus faible ou de qualité la plus élevée selon le type d'alignement
Sinon, c'est la première image de la séquence qui n'est pas exclue.
Pour spécifier une image comme référence, vous pouvez :
Ouvrir le sélecteur d'images, sélectionner l'image à définir comme nouvelle référence et cliquer sur le bouton Image de référence.
Utiliser la commande setref. Par exemple, si vous voulez définir l'image n°10 comme référence :
setref 10
Ligne de commande Siril
setref sequencename image_number
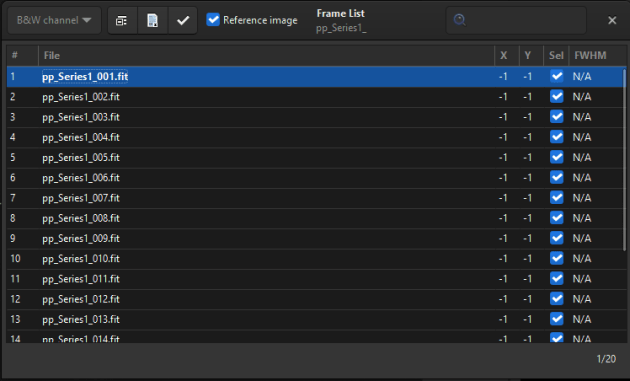
La boîte de dialogue de la liste des images. Vous pouvez parcourir toutes les images de la séquence.
Pendant l'empilement, l'image de référence est également utilisée comme référence de normalisation, si la normalisation est activée.
Image de référence externe
Il est également possible d'utiliser une image extérieure à la séquence comme référence pour l'alignement. Ceci est disponible pour la méthode d'alignement global (directe et en 2 passes).
Le principal cas d'usage est l'alignement de plusieurs séquences, par exemple des séquences distinctes pour les canaux R, G et B, sur le même repère de coordonnées absolu en une seule étape d'alignement. Comme toutes les séquences partagent la même référence externe, les séquences alignées résultantes sont déjà mutuellement alignées et peuvent être directement empilées ou composées. Cela évite d'avoir à réaligner les empilements finaux dans l'outil de composition RVB, ce qui introduirait une passe d'interpolation supplémentaire et dégraderait la qualité de l'image.
Astuce
L'image de référence externe n'a pas besoin d'appartenir à l'une des séquences en cours d'alignement. Une image précédemment empilée ou résolue astrométriquement fonctionne bien comme ancrage commun.
Note
Lorsque la correction de distorsion est activée avec une référence externe, Siril doit également corriger la distorsion des étoiles détectées dans la référence externe avant de les faire correspondre aux étoiles de la séquence. Le comportement dépend de la source de Correction de distorsion choisie :
Depuis l'image, Siril lit les coefficients de distorsion SIP à partir de l'entête WCS de l'image de référence externe et les utilise pour corriger uniquement les positions de ses étoiles. Si la référence externe a déjà été corrigée (par ex. un empilement déjà corrigé), ses coefficients SIP auront été retirés de l'entête ; Siril n'en trouvera aucun et traitera l'image comme exempte de distorsion. La référence externe doit donc avoir été résolue astrométriquement.
Depuis un fichier FITS/WCS, le même modèle de distorsion que celui appliqué à la séquence est également appliqué à la référence externe. Cependant, comme il n'existe pas d'entrée de distorsion séparée pour la référence externe, si celle-ci est résolue astrométriquement, Siril préférera utiliser ses propres coefficients WCS/SIP, car ils correspondent probablement mieux.
Depuis les maîtres, Siril récupère le fichier de distorsion maître correspondant à l'image de référence externe. De même, si la référence externe est résolue astrométriquement, Siril préférera utiliser ses propres coefficients WCS/SIP.
Aucune ou tout autre cas, aucune correction de distorsion n'est appliquée à la référence externe.
Dans tous les cas, le modèle de distorsion utilisé pour la séquence elle-même est indépendant et reste inchangé.
Méthodes d'alignement
Alignement global
Il s'agit de l'algorithme préféré pour aligner les images du ciel profond avec un recouvrement suffisant.
L'alignement global est basé sur la méthode de similarité des triangles pour identifier automatiquement les étoiles communes dans chaque image [Valdes1995]. Notre implémentation est basée sur le programme match de Michael Richmond. Ensuite, l'algorithme RANSAC [Fischler1981] est utilisé sur les listes d'étoiles pour rejeter les aberrations et déterminer la matrice de projection. La robustesse de l'algorithme dépend de la capacité à détecter les étoiles tout en évitant les fausses détections. Siril dispose d'un algorithme de détection des étoiles très élaboré qui évite autant que possible de sélectionner des objets qui ne sont pas des étoiles dans le temps le plus court possible. La détection des étoiles les plus brillantes est généralement la plus importante. Cependant, s'il est nécessaire de détecter des étoiles moins brillantes, alors la fenêtre PSF Dynamique peut être utilisée pour ajuster les paramètres de détection.
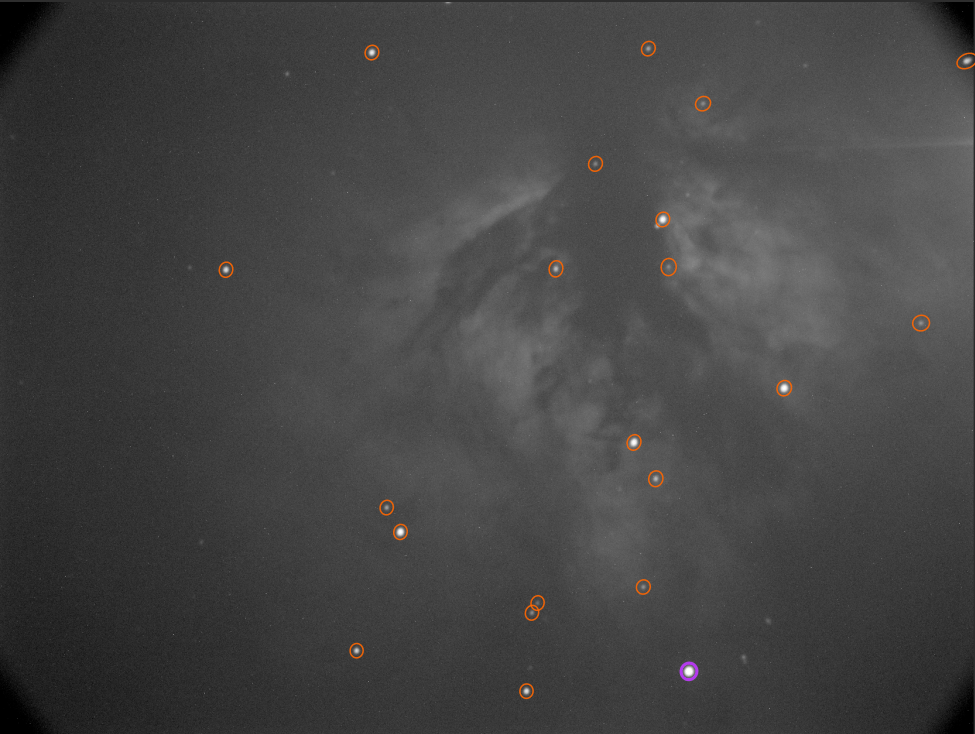
Détection automatique des étoiles dans une image unique
Il existe certaines options associées à cette méthode d'alignement.
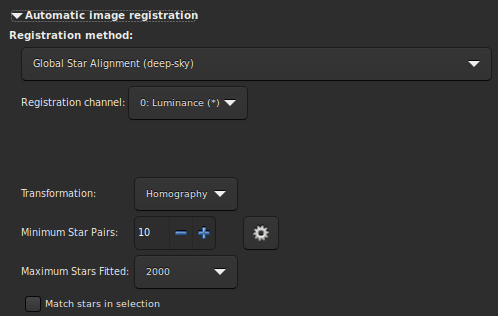
Options d'alignement global
Le menu déroulant Transformation permet de choisir entre différentes transformations.
Avertissement
La mise en correspondance initiale des étoiles utilise l'algorithme de similarité des triangles, en conséquence le minimum de paires d'étoiles doit être au moins de 3 pour Translation, Similarité et Affine et de 4 pour Homographie.
Les autres options d'alignement sont :
Le bouton Min. paires d'étoiles définit le nombre minimum de paires d'étoiles qu'une image donnée peut avoir par rapport à l'image de référence. Si une image donnée a moins de paires d'étoiles, elle ne sera pas alignée. A droite de cette option se trouve un bouton qui ouvre l'outil PSF Dynamique.
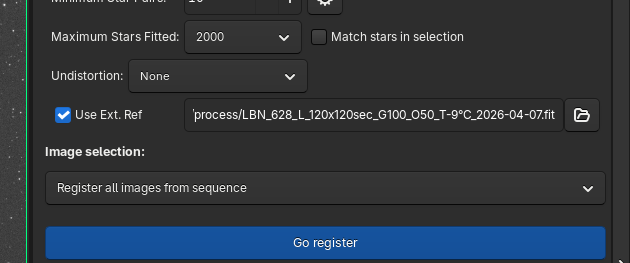
L'option Maximum d'étoiles ajustées définit le nombre maximum d'étoiles à rechercher dans chaque image (par défaut 2000). Plus cette valeur est grande, plus il y aura d'étoiles potentiellement détectées, résultant en une détection plus longue mais un alignement plus précis.
Utilisez l'option Aligner les étoiles dans la sélection si vous voulez exécuter l'algorithme d'alignement global des étoiles dans la zone sélectionnée dans l'image de référence. Si aucune sélection n'est effectuée, cette option est ignorée.
Le champ Utiliser réf. ext. permet de spécifier une image de référence externe, c'est-à-dire une image extérieure à la séquence courante. Lorsqu'il est défini, toutes les images de la séquence sont alignées par rapport à cette image au lieu de l'image de référence interne de la séquence. Laissez ce champ vide pour utiliser la référence interne normale. Voir Image de référence externe pour le cas d'usage typique.
Le menu déroulant Correction de distorsion permet de choisir entre différentes corrections :
Aucun
À partir de l'image
À partir d'un fichier FITS/WCS
A partir des maîtres
*.wcs contenant des coefficients de distorsion.Astuce
Pour que cette dernière option, Depuis les maîtres, fonctionne, vous devrez avoir défini un chemin de distorsion maître dans les préférences. Pour créer un fichier maître, rendez-vous ici.
Les options en bas vous permettent de :
Éliminez les images qui ont été désélectionnées de la séquence.
Choisir entre interpolation et drizzle pour l'exportation des images. Ce sont les mêmes que dans la section Sortie d'alignement, elles ne sont pas expliquées davantage ici.
Ligne de commande Siril
register sequencename [-2pass] [-selected] [-prefix=] [-scale=]
register sequencename ... [-layer=] [-transf=] [-minpairs=] [-maxstars=] [-nostarlist] [-disto=]
register sequencename ... [-interp=] [-noclamp] [-extref=filepath]
register sequencename ... [-drizzle [-pixfrac=] [-kernel=] [-flat=]]
Alignement 2 passes
Pour activer cette option, cochez simplement la case correspondante après avoir choisi Alignement global dans le menu déroulant des méthodes.
Ceci n'effectue que la première (des 2 passes), ce qui permet de choisir l'image de référence à partir des informations sur les étoiles détectées au lieu de choisir automatiquement la première image de la séquence. Les options proposées sont similaires à l'algorithme d'Alignement global mais cette méthode ne crée aucune séquence et toutes les informations d'alignement sont enregistrées dans le fichier seq.
Pendant la détection des étoiles, Siril fixe un maximum de 2000 étoiles à trouver (ceci peut aussi être changé avec l'option appropriée). Dans le cas où plus d'une image a atteint les limites maximales d'étoiles, les listes d'étoiles de toutes les images sont examinées à nouveau. Un nouveau seuil de détection minimum est défini pour pouvoir trier les images à la fois par nombre d'étoiles détectées et par FWHM.
Les listes d'étoiles de toutes les images sont sauvegardées, l'extension .fit(s) étant remplacée par .lst. Ceci permet de ré-exécuter l'algorithme 2pass très rapidement avec des paramètres différents, par exemple une transformation différente. Dans le cas où la détection des étoiles a été modifiée, le processus détecte ces changements et relance l'analyse si nécessaire.
Cet alignement doit généralement être suivi par Appliquer l'alignement existant afin d'appliquer la transformation et de construire une nouvelle séquence, à moins que vous n'ayez choisi de calculer le Translation.
Ces lignes effectuent un alignement en deux passes sur une séquence nommée pp_light et l'appliquent. La sortie est une séquence pp_light.
# Align lights in 2 passes
register pp_light -2pass
seqapplyreg pp_light
Ces lignes effectuent un alignement en deux passes sur une séquence nommée colors et l'appliquent tout en recadrant les images de sortie à la surface commune minimale. La sortie est une séquence pp_colors. Ceci peut être utile avant de composer des images mono (les zones qui ne sont pas communes à toutes les images sont recadrées).
# Align layers in 2 passes and crop away borders
register colors -2pass
seqapplyreg colors -framing=min
Alignement sur 1-2-3 étoiles
Lorsque les images contiennent peu d'étoiles, par exemple dans le cas des images de ciel profond rapide où le temps d'exposition est inférieur à une seconde. Il est possible que l'algorithme d'alignement global échoue, même si vous modifiez les paramètres de détection dans la fenêtre PSF Dynamique. Il peut alors être intéressant de faire une détection manuelle des étoiles que l'on veut aligner. C'est l'intérêt de l'algorithme d'alignement de 1, 2 ou 3 étoiles.
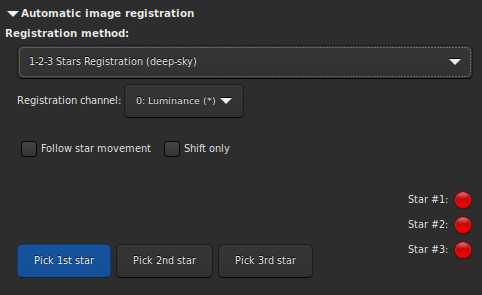
Option d'alignement sur 1-2-3 étoiles
Le principe de cette méthode est de dessiner une zone de sélection autour d'une étoile et de cliquer sur le bouton Pointer l'étoile 1, et ainsi de suite.
Si une seule étoile est sélectionnée, seule la translation entre les images sera calculée. En conséquence, le bouton Translation seulement est automatiquement sélectionné. Les valeurs de translation sont alors stockées dans le fichier
seq.Si deux ou trois étoiles sont sélectionnées, la rotation peut être calculée et appliquée pour créer une nouvelle séquence. Cependant, si l'option Translation seulement est sélectionnée, ce qui n'est pas obligatoire, seuls les décalages seront calculés.
L'option Suivre le mouvement de l'étoile utilise la position des étoiles trouvées dans l'image précédente comme nouveau centre pour l'alignement de l'image actuelle. Cela permet de réduire la zone de sélection, d'accélérer l'alignement et de tenir compte de la dérive ou des images comportant un grand nombre d'étoiles.
Avertissement
L'activation de cette option implique que l'alignement n'est pas parallélisé et qu'il s'exécute sur un seul cœur du processeur.
Alignement par motif de l'image (planétaire - disque entier)
Il s'agit d'un simple alignement par translation en utilisant la méthode de corrélation croisée dans le domaine spatial.
Cette méthode est rapide et est utilisée pour aligner les films planétaires, dans lesquels des informations contrastées peuvent être observées sur de grandes zones de l'image. Elle peut également être utilisée pour l'alignement d'images du ciel profond. Néanmoins, il faut garder à l'esprit qu'il s'agit d'une méthode d'alignement en un seul point, ce qui la rend peu adaptée à l'alignement de planètes en haute définition. Mais elle permet d'ancrer efficacement les images pour stabiliser la séquence. Il suffit de faire une sélection autour de l'objet (la planète par exemple) et de s'assurer que son mouvement pendant la séquence est contenu dans la sélection. Seule la translation peut être calculée avec cette méthode.
Option d'alignement par motif
Point d'alignement multiple
Il s'agit d'un alignement multipoint avancé adapté aux vidéos planétaires, initialement développé avec le soutien de Rolf Hempel (l'auteur de PlanetarySystemStacker) puis relancé pour devenir une fonctionnalité mature, pouvant être intégrée dans le cycle de développement 1.5. Cette méthode se sélectionne de la même manière que les autres méthodes d'alignement, mais fonctionne ensuite un peu différemment. Cette méthode est décrite en détail sur la page Multipoint
KOMBAT
Cette méthode provient de la bibliothèque OpenCV, une bibliothèque largement utilisée dans Siril. Ils expliquent :
Il suffit de faire glisser l'image modèle sur l'image d'entrée (comme dans la convolution 2D) et de comparer le modèle et le patch de l'image d'entrée sous l'image modèle. Plusieurs méthodes de comparaison sont implémentées dans OpenCV. (Vous pouvez consulter la documentation pour plus de détails). Il renvoie une image en niveaux de gris, où chaque pixel indique dans quelle mesure le voisinage de ce pixel correspond au modèle.
En pratique, il suffit de tracer une sélection autour de l'objet (la planète par exemple) et de s'assurer que son mouvement au cours de la séquence est contenu dans la sélection. Seule la translation peut être calculée avec cette méthode.
Alignement Comète/Astéroïdes
L'outil d'alignement cométaire fonctionne d'une façon très simple, en deux étapes.
Dans le sélecteur d'image, sélectionnez la première image de la séquence, entourer le noyau cométaire, ensuite cliquer sur le bouton Pointer objet dans #1.
Ensuite sélectionnez la dernière image de la séquence, entourez le noyau cométaire, ensuite cliquez sur le bouton Pointer objet dans #2.
La vitesse de la comète \(\Delta x\) et \(\Delta y\) est calculé en pixel par heure si tout est ok.
Avertissement
L'alignement de la comète doit se faire sur des images dont les étoiles ont été préalablement alignées. Soit via une nouvelle séquence, avec l'alignement global, soit en ayant sauvegardé les informations d'alignement dans le fichier seq, via un alignement 2-pass ou astrométrique.
Note
Pour fonctionner pleinement, les images doivent être horodatées.
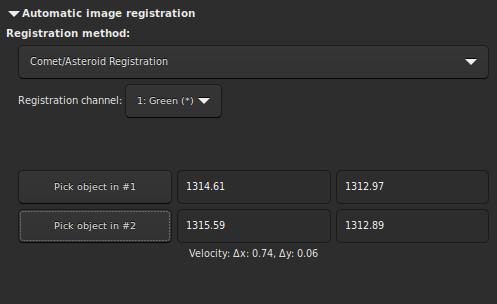
Options d'alignement pour une comète
Astuce
Si la détection PSF échoue à détecter un objet, elle renverra le centre de la boîte qui a été dessinée. Cela peut être pratique si vous souhaitez aligner sur un objet non visible sur vos subs. Utilisez les annotations d'objets du système solaire pour tracer la position d'un astéroïde et dessinez une boîte autour du marqueur pour capturer sa position.
Cette méthode produira un nouveau fichier de séquence, avec le nom de séquence précédé du préfixe défini (comet_ par défaut). Cela ne crée cependant pas de nouvelles images, mais des liens symboliques vers les images d'origine. Pour les utilisateurs Windows, veuillez vous assurer d'avoir activé le mode développeur, sinon, des copies complètes seront créées. Voir aussi la remarque sous ce tableau.
Alignement manuel
Cette dernière méthode d'alignement est très particulière, ce qui explique sa position à part, et permet d'aligner les images manuellement. Bien entendu, seule la translation entre les images est autorisée.
La première chose à faire est de définir deux aperçus dans l'image. En cliquant sur le bouton Définir 1er aperçu (Définir la première prévisualisation), vous initialiserez la première prévisualisation. Il faut alors cliquer sur une zone de l'image, idéalement une étoile à proximité d'un bord de l'image pour définir la zone de prévisualisation. Un clic sur le second bouton Définir 2d aperçu permet de faire de même sur un second point.
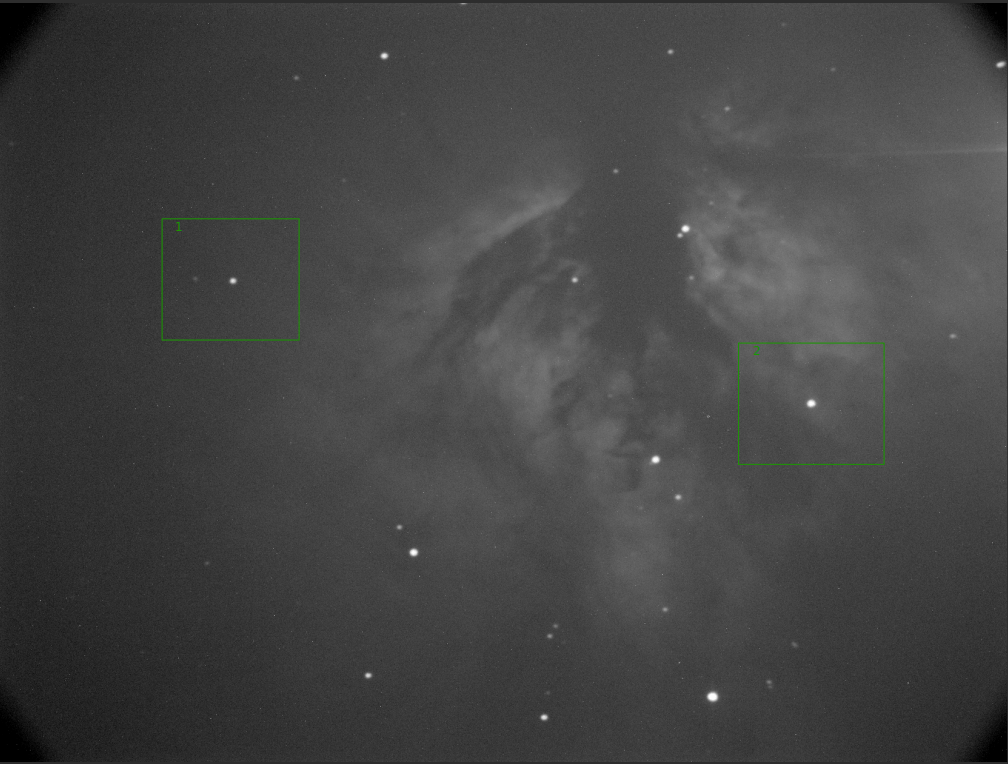
Il est très important d'avoir une image de référence déjà définie avec le Sélecteur d'image. Par défaut, il s'agit de la première image. L'utilisateur est libre de choisir celle qu'il veut. Elle servira d'image de référence, vu par transparence, pour aligner les images manuellement avec les boutons numériques. Ensuite, parcourez les images une à une pour appliquer la même méthode à l'ensemble de la séquence.
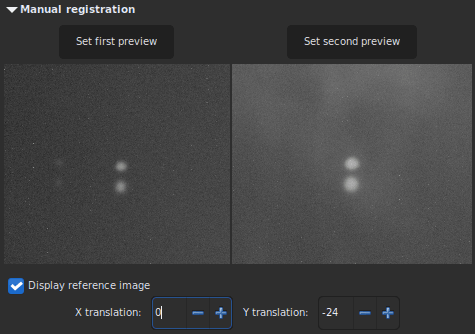
Le décalage en Y est trop important, les mêmes étoiles sur des images différentes ne se chevauchent pas.

Les décalages X et Y semblent corrects. L'image actuelle est alignée sur l'image de référence.
Alignement astrométrique
Introduit dans la version 1.3, c'est le mode préféré pour assembler des mosaïques ou des images avec peu de chevauchement. Il peut également être utile pour aligner des empilements issus de configurations différentes (optiques différentes, caméras différentes, champs de vision différents, etc.).
Elle n'a pas d'entrée dans le menu déroulant des méthodes d'alignement, car les informations nécessaires pour exporter les images alignées ont déjà été calculées lors de la résolution astrométrique de la séquence. Il vous suffit d'appliquer l'alignement existant.
La correction de distorsion sera appliquée telle que définie lors de la résolution astrométrique de la séquence, ce qui signifie que si les images ont été résolues en utilisant un ordre SIP supérieur à 1, la correction de distorsion sera automatiquement incluse. À moins de disposer d'un champ parfaitement plat optiquement, il est généralement conseillé de faire la résolution astrométrique avec SIP, comme illustré ci-dessous, avec et sans correction de distorsion.
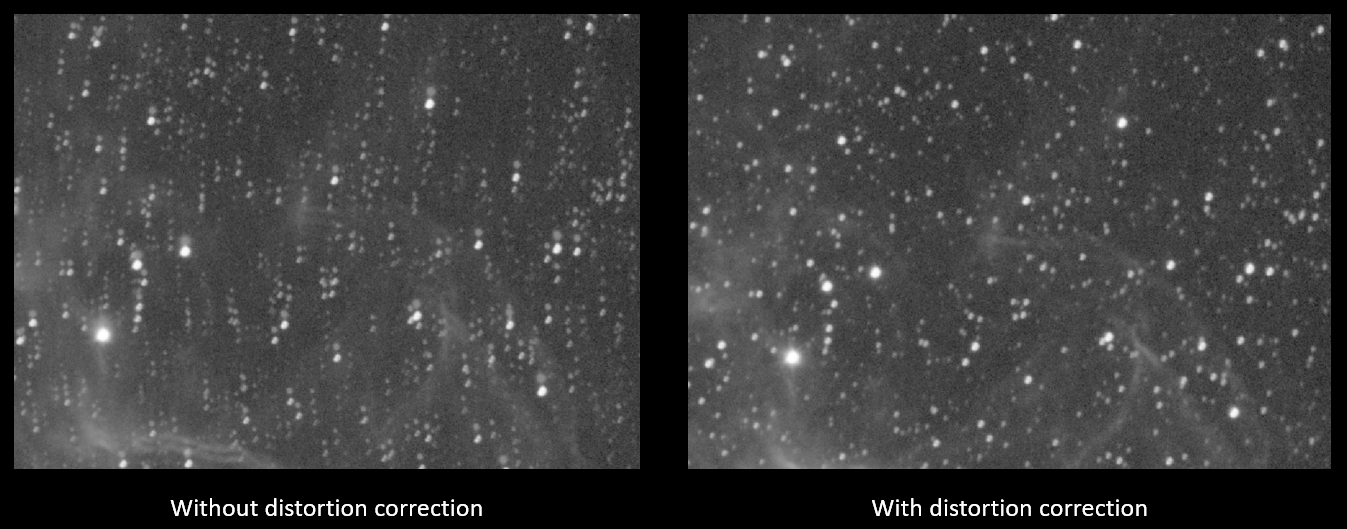
Effet de la suppression de la distorsion sur deux panneaux superposés après alignement
Appliquer Alignement Existant
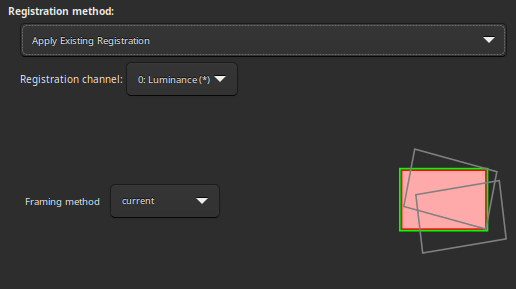
Il ne s'agit pas d'un algorithme, mais plutôt d'une commodité pour appliquer les données d'alignement précédemment calculées et stockées dans le fichier de séquence. La méthode d'interpolation peut être sélectionnée dans la section Sortie d'alignement. Vous pouvez également utiliser le filtrage d'image pour éviter d'aligner des images inutiles, comme dans l'empilement Rejet des images. Il y a aussi une option Drizzle pour appliquer l'alignement en utilisant le drizzle au lieu de l'interpolation. Voir la section Drizzle pour plus de détails.
Quatre méthodes de cadrage sont disponibles :
 : Actuelle utilise l'image actuelle comme image de référence. Il s'agit du comportement par défaut.
: Actuelle utilise l'image actuelle comme image de référence. Il s'agit du comportement par défaut. : maximum (zone de délimitation) ajoute un bord noir autour de chaque image si besoins affin qu'aucune partie de l'image soit recadré lors de l'alignement.
: maximum (zone de délimitation) ajoute un bord noir autour de chaque image si besoins affin qu'aucune partie de l'image soit recadré lors de l'alignement. : minimum (zone commune) recadre chaque image sur la zone qu'elle a en commun avec toute les images de la séquence.
: minimum (zone commune) recadre chaque image sur la zone qu'elle a en commun avec toute les images de la séquence. : centre de gravité détermine la meilleur position de cadrage en tant que centrer de gravité (cog) de toutes les images.
: centre de gravité détermine la meilleur position de cadrage en tant que centrer de gravité (cog) de toutes les images.
Astuce
Introduit dans Siril 1.3, le mode max n'exporte pas les images avec des bordures noires englobant l'image résultante complète. Les images sont exportées avec la projection nécessaire, et les décalages relatifs requis pour composer l'image finale sont conservés dans le fichier seq résultant.
Le bouton Estimer lancera le calcul du cadrage, sans exporter les images. Cette information peut être intéressante pour connaître à l'avance la taille des images exportées. Cela tient compte de la méthode de cadrage sélectionnée et du facteur d'échelle choisi dans la Sortie d'alignement.
En appuyant sur Estimer, la console affichera une sortie comme celle-ci :
Output image: 7893 x 5254 pixels (assuming a scaling factor of 1.30)
Option d'Appliquer Alignement Existant
Ligne de commande Siril
seqapplyreg sequencename [-prefix=] [-scale=] [-layer=] [-framing=]
seqapplyreg sequencename ... [-interp=] [-noclamp]
seqapplyreg sequencename ... [-drizzle [-pixfrac=] [-kernel=] [-flat=]]
seqapplyreg sequencename ... [-filter-fwhm=value[%|k]] [-filter-wfwhm=value[%|k]] [-filter-round=value[%|k]] [-filter-bkg=value[%|k]] [-filter-nbstars=value[%|k]] [-filter-quality=value[%|k]] [-filter-incl[uded]]
[-filter-fwhm=value[%|k]] [-filter-wfwhm=value[%|k]] [-filter-round=value[%|k]] [-filter-bkg=value[%|k]]
[-filter-nbstars=value[%|k]] [-filter-quality=value[%|k]] [-filter-incl[uded]]
Sortie d'alignement
Ce cadre contient tous les éléments de sortie de la séquence. Vous pouvez choisir entre Interpolation et Drizzle pour exporter les images.
Avertissement
Elles peuvent ne pas être toutes deux disponibles selon la nature de la séquence d'entrée :
pour les séquences mono, interpolation et Drizzle peuvent être sélectionné
pour les séquences CFA (image couleur non débayerisé), seul Drizzle est disponible
pour les séquences RGB (images couleurs débayerisé), seul l'interpolation est disponible
Les deux méthodes partagent les mêmes options :
Échelle, une valeur comprise entre 0.1 et 2, utilisée pour redimensionner les images de sortie.
Préfixe, le préfixe qui sera ajouté au début pour former le nom de la séquence exportée (par défaut
r_).
Interpolation
Les pixels des images résultantes sont interpolés par un algorithme laissé au choix de l'utilisateur. Il existe 5 algorithmes d'interpolation possibles, plus une option Aucun :
Plus Proches Voisins
Bilinéaire
Bicubique
Zone de relation des pixels
Lanczos-4
Aucun
Les méthodes d'interpolation les plus efficaces sont généralement bicubique et Lanczos-4 (utilisée par défaut). Cependant, elles nécessitent généralement que l'option Contrainte de l'interpolation soit activée pour éviter les artefacts en anneau autour des étoiles, ce qui rend l'opération d'interpolation deux fois plus lente. Nous l'activons tout de même par défaut car elle apporte une amélioration significative de la résolution, avec souvent une FWHM inférieure de 8 % par rapport à la méthode par défaut de Siril 1.0 (aire de pixel). Il est possible que la contrainte ne soit pas utile pour vos images, nous vous recommandons de comparer les résultats avec vos propres images.
Le cas particulier de Aucun est réservé au cas de l'alignement global et de l'application de l'alignement existant. Si vous souhaitez exporter ou sauvegarder une séquence qui ne contient que de la translation, sans utiliser d'interpolation (afin de ne pas modifier les valeurs des pixels), vous devez sélectionner Aucun.

Options de sortie pour l'interpolation
Drizzle
Le bouton Drizzle active l'algorithme drizzle pour le traitement de cette séquence. Voir la section Drizzle pour plus de détails.
Avertissement
La contrepartie de cette technique est que la quantité de mémoire et d'espace disque nécessaire à la création et au traitement des images drizzle est multipliée par le carré du facteur d'échelle du drizzle.

Options de sortie pour drizzle
Solution astrométrique des images alignées
Lorsque les images alignées sont exportées, elles héritent de la solution astrométrique de l'image de référence, le cas échéant. Sinon, leur solution précédente est effacée. Bien évidemment, la nouvelle solution de chaque image tient compte des transformations qu'elle a subies au cours du processus d'alignement.
Si une solution de distorsion est trouvée dans l'image de référence mais qu'aucune correction de distorsion n'a été appliquée lors du calcul des transformations - par exemple si vous n'avez sélectionné aucune Distortion dans le menu déroulant des méthodes globale ou 2-pass, un avertissement s'affichera dans la Console. Les informations de distorsion seront conservées dans les images alignées. Si elles sont significatives, vous pourrez en voir l'effet lors de l'empilement. Dans ce cas, vous devrez refaire l'alignement en utilisant une spécification de distorsion.
Références
Fischler, M. A., & Bolles, R. C. (1981). Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography. Communications of the ACM, 24(6), 381-395.
Valdes, F. G., Campusano, L. E., Velasquez, J. D., & Stetson, P. B. (1995). FOCAS automatic catalog matching algorithms. Publications of the Astronomical Society of the Pacific, 107(717), 1119.