Principes
La photométrie est la science de la mesure de la lumière. Elle vise à mesurer le flux ou l'intensité de la lumière émise par les objets astronomiques. Dans Siril, la photométrie peut être utilisée pour analyser la courbe de lumière des étoiles variables, les transits d'exoplanètes ou les occultations d'étoiles, ou pour calibrer les couleurs dans les images RVB.
La photométrie d'ouverture est la méthode utilisée. Son principe de base consiste à additionner le flux observé dans un rayon donné à partir du centre d'un objet, puis à soustraire la contribution totale du fond du ciel dans la même région (calculée dans l'anneau entre les rayons intérieur et extérieur, en excluant les pixels déviants), ce qui ne laisse que le flux de l'objet pour calculer une magnitude instrumentale. Ceci est illustré dans la figure suivante.
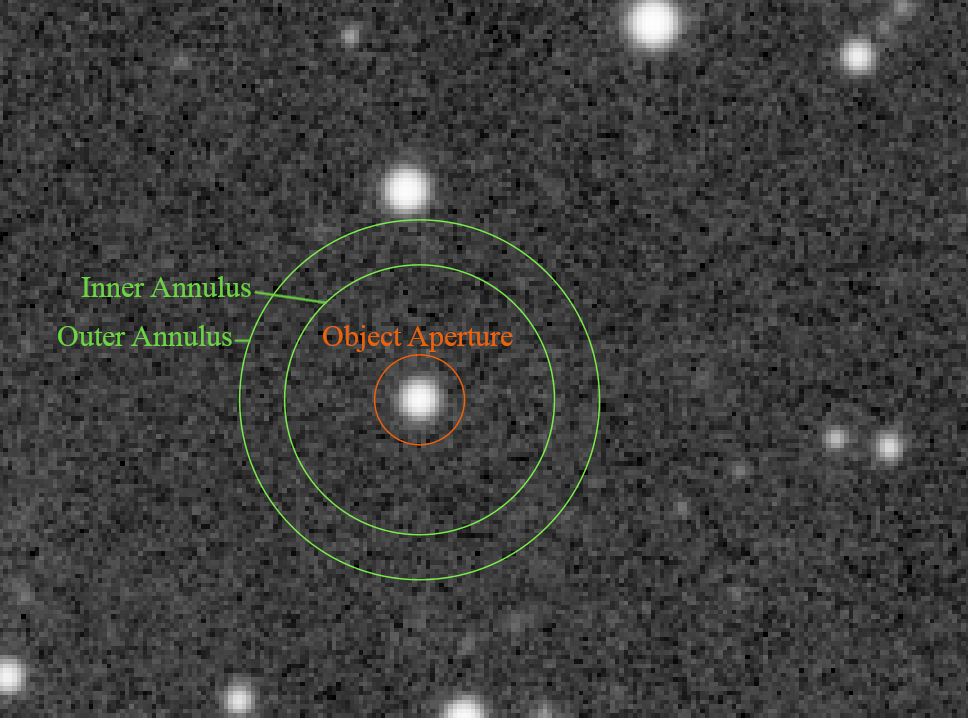
Cercles de la photométrie d'ouverture
Les valeurs de ces paramètres peuvent être modifiées dans la section Photométrie des préférences ou en utilisant la commande setphot. L'ouverture doit contenir tous les pixels de l'objet à mesurer, l'annulus ne doit par opposition contenir aucun de ses pixels. Par défaut, l'ouverture est ajustée pour une cible en utilisant deux fois le FWHM de la PSF, mais la taille de l'anneau est fixe. Ces valeurs doivent être ajustées pour un échantillonnage donné et vérifiées avec soin.
Note
Le texte suivant est une copie tronquée et modifiée de l'excellente documentation du logiciel MuniPack, de David Motl et publiée sous la licence de documentation libre GNU, dont les sources sont disponibles ici.
Mesurer la magnitude d'un objet
La somme S des pixels dans une petite zone A autour d'un objet est la somme de l'intensité nette de l'objet I et du l'intensité de l'arrière plan \(B\cdot A\) :
La valeur de S et B est obtenu depuis l'image source, la zone A est déterminé comme l'aire d'un cercle de rayon r, avec r la taille de l'ouverture en pixels. Il est alors facile de calculer l'intensité net I d'un objet en ADU :
Supposons que l'intensité net I est proportionnel au flux observé F, nous pouvons déduire la magnitude apparente m de l'objet en utilisant la loi de Pogson :
Estimation de l'erreur de mesure
Une fois que nous avons obtenu la luminosité instrumentale brute d'un objet, nous allons essayer d'estimer son erreur standard. Tout d'abord, nous allons rappeler quelques règles générales qui s'appliquent à l'erreur standard et à sa propagation. Il s'agit d'une règle générale pour la propagation de l'erreur à travers une fonction f de valeur incertaine X :
En utilisant cette règle générale, nous déduisons deux lois de propagation des erreurs. Dans le premier cas, la valeur incertaine X est multipliée par une constante a et décalée par un décalage constant b. Cette loi peut également être utilisée dans le cas où il n'y a qu'une multiplication ou qu'un décalage.
La deuxième loi définit l'erreur d'un logarithme d'une valeur incertaine X :
Veuillez noter que la fonction log est ici le logarithme naturel, alors que la formule de Pogson (voir ci-dessus) incorpore le logarithme en base 10. L'équation suivante nous aide à gérer cette différence :
En mettant ces deux équations ensemble, on obtient :
Si nous avons deux variables incertaines non corrélées X et Y, la variance de leur somme est la somme de leurs variances, cette équation est connue sous le nom de formule de Bienaymé.
À partir de cette formule, nous pouvons également déduire l'erreur standard d'une moyenne d'échantillon. Si nous avons N observations de la variable aléatoire X avec une estimation basée sur l'échantillon de l'erreur standard de la population s, alors l'erreur standard d'une estimation de la moyenne de la population par la moyenne de l'échantillon est la suivante
Forts de ces connaissances, nous pouvons commencer à réfléchir à l'estimation de l'erreur standard de la luminosité de l'objet. Nous considérerons les trois sources d'incertitude suivantes : (1) le bruit aléatoire à l'intérieur de l'ouverture de l'étoile qui comprend le bruit thermique du détecteur, le bruit de lecture de l'amplificateur de signal et du convertisseur analogique-numérique, (2) les statistiques de Poisson du comptage d'événements discrets (photons incidents sur un détecteur) qui se produisent pendant une période de temps fixe et (3) l'erreur d'estimation du niveau moyen du ciel.
Pour l'estimation du niveau moyen du ciel, nous avons utilisé l'algorithme de la moyenne robuste. Il permet d'estimer la variance de l'échantillon \(\sigma_{pxl}^2\). Il s'agit d'une variance basée sur les pixels et comme nous avons additionné A pixels dans l'ouverture de l'étoile, la formule de Bienaymé s'applique, la somme S est une somme de A variables aléatoires non corrélées, chacune ayant une variance \(\sigma_{pxl}^2\). Pour la variance de la première source d'erreur, nous obtenons :
où A est le nombre de pixel dans l'ouverture de l'étoile.
À partir des statistiques de Poisson, nous pouvons déduire une variance due au comptage d'événements discrets, les photons incidents sur un détecteur, qui se produisent au cours d'une période de temps fixe, l'exposition. Nous devrons à nouveau utiliser le gain p du détecteur pour convertir une intensité en ADU en un nombre de photons. Si l'intensité nette mesurée d'un objet est I, nous calculons le nombre moyen de photons \(\lambda\) comme suit
Note
La valeur du gain p du détecteur peut être modifiée dans la section Photométrie des préférences de Siril
Alors, la variance de l'intensité due à la statistique de Poisson est égale à sa valeur moyenne.
La variance est en photon, nous devons la reconvertir en ADU pour avoir la variance en \(ADU^2\).
Nous avons dérivé le niveau du ciel comme une moyenne d'échantillon de la population de pixels dans l'anneau du ciel. Comme chaque pixel de l'anneau a une variance \(\sigma_{pxl}^2\), la variance de la moyenne de l'échantillon est de
avec \(n_{sky}\) le nombre de pixel dans l'anneau de ciel.
Grâce à l'équation (9) nous calculons la variance de l'intensité d'un objet comme
Notez que dans l'équation (2) le niveau du ciel est multiplié par A, nous devons donc multiplier sa variance par \(A^2\) - voir l'équation (16). Maintenant, nous utilisons la loi de propagation de l'erreur pour le logarithme adopté pour correspondre à la formule de la loi de Pogson.
En combinant les équations (17) et (16), nous pouvons dériver l'erreur standard de la luminosité de l'objet en magnitudes comme suit