Registration
Registration is basically the process of aligning the images from a sequence to be able to process them afterwards. All the processes described hereafter calculate the transformation to be applied to each image in order to be aligned with the reference image of the sequence.
Siril's strength lies in the wide variety of recording algorithms offered. Each method is explained below. Pressing the Go register button starts the registration of the sequence.
It is possible to choose the registration channel. Green is the default for color images, Luminance for monochrome. The (*) sign appearing after the channel's name means that registration data is already available for this layer. When processing images, registration data is taken from the default layer if available (for RGB images: Green, else fallback to Blue then Red).
Theory
Registration process
What we call Registration is in fact a three-step process:
Detect features to be matched in all the images
Compute the transformations between each image and the reference image
Apply the computed transformation to each image to obtain new images
Depending on the registration method selected, the 3 steps occur (or not) into a single process. Siril uses the most sensible defaults (choosing whether or not to apply the computed transformation) depending on the registration method selected, but understanding the internal machinery may help you to change this behavior to better suit your needs.
Algorithms
The table here below details the different algorithms used for the first 2 steps (detection and transformation calculation).
Registration method |
Feature detection |
Transformation calculation |
New seq |
|---|---|---|---|
Global |
Triangles matching + RANSAC |
Y |
|
Global with 2 pass |
N |
||
1-2-3 stars |
PSF minimization in selection box |
Singular Value Decomposition (2-3 stars) Difference (1 star) |
N |
Image Pattern alignment |
cross correlation on selection box |
N |
|
KOMBAT |
Max of convolution in spatial domain on selection box |
N |
|
Comet |
PSF minimization in selection box |
Shifts from velocity vector using timestamps |
Y(*) |
Manual |
Your eyes |
Your hand |
N |
Astrometry |
From astrometric solution |
N |
|
Note
(*) Comet registration creates a new sequence file (with the prefix comet_ by default) and creates "new" images. If registration data was present in the input sequence, the comet shifts are composed with this pre-existing registration data. The "new" images created are simply symlinks to the input images, so that they do not use up additional storage space. This change introduced in version 1.4 was made to clarify whether or not a sequence containing registration data, had only star alignment or star+comet shift alignment. Exporting a new sequence now makes it obvious that additional shifts are included. It also enables to use the same input sequence and generating multiple sequences aligned on different moving objects.
The table below lists the transformations compatible with each method, and if undistortion is available as well.
Registration method |
Shift |
Euclidean |
Similarity |
Affine |
Homography |
Undistort |
|---|---|---|---|---|---|---|
Global |
subpixel |
x |
x |
x |
x |
|
2 pass |
subpixel |
x |
x |
x |
x |
|
1-2-3 stars |
subpixel (1-2-3) |
(2-3) |
||||
Image Pattern alignment |
pixel |
|||||
KOMBAT |
pixel |
|||||
Comet |
subpixel |
|||||
Manual |
pixel |
|||||
Astrometry |
x |
x |
It is also important to keep in mind how the registered sequence is fed into the stacking process that is generally used right after registration:
if the transformation consists only of pixel-wise shifts, the stacking algorithm can use these shifts on-the-fly when reading the images. It means you do not need to generate "registered images". This saves storage space and skips interpolation. It is, of course, at the expense of less accurate registration (i.e. subpixel accuracy) but is generally used on planetary/lucky imaging images where sampling is small. This can also be applied with a registration method which computes subpixel shifts. During the stacking process, the shifts will be rounded off to pixel precision. In any other case, meaning the stacking is fed with a sequence where the registration has computed transformations more complex than just shifts but the registered images have not been saved, Siril will emit a warning inviting you to export the registered images before proceeding to stacking.
In all other cases, once the transformations have been computed, the transformed images need to be saved before proceeding to stacking, generally named with
r_prefix.
Image transformations
Linear transformations
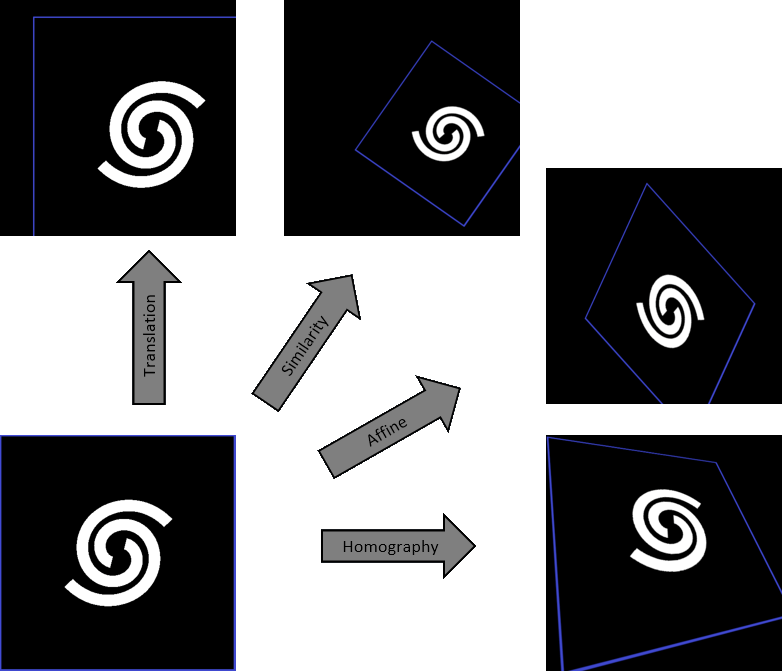
Siril uses linear transformations, with different degrees-of-freedoms, to map an image to the reference image:
Shift is a 2 degree-of-freedom (x/y shifts) rigid mapping, well-suited for images with no distortion, no scaling and no field rotation. It needs only 1 pair of stars (or feature) to be matched to define the transformation.
Euclidean is a 3 degree-of-freedom (x/y shifts + one rotation) rigid mapping, for images with no distortion, no scaling. It needs at least 2 pairs of stars to be matched to define the transformation.
Similarity is a 4 degree-of-freedom (one scale, one rotation and x/y shifts) more rigid mapping than homography, well-suited for images with no distortion. It needs at least 2 pairs of stars to be matched to define the transformation.
Affine is a 6 degree-of-freedom (two scales, one shear, one rotation and x/y shifts) more rigid mapping than homography, well-suited for images with little distortion. It needs at least 3 pairs of stars to be matched to define the transformation.
Homography is the default transformation which uses an 8-degree-of-freedom transform to warp the images onto the reference frame. This is well-suited for the general case and strongly recommended for wide-field images. It needs at least 4 pairs of stars to be matched to define the transformation.
Distortions
Since version 1.3, Siril can also account for distortions, for some of the registrations methods as listed in this table. Distortion coefficients handled by Siril follow SIP convention. This convention assumes that the pixel coordinates need to be corrected BEFORE trying to map them through a linear transformation. In WCS jargon, this is called a prior distortion (as opposed to a sequent distortion).
Those coefficients are used twice during the registration process:
the stars positions detected in "distorted" conditions are first corrected, both in the image to be aligned and the reference image (or the stars projected positions for astrometric registration). The linear transformation that maps the stars from the current image to the reference is then computed.
When exporting the registered image, it is first corrected for distortion and then linearly projected to be aligned to the reference image. Note that this actually occurs in a single operation (the pixel mapping is computed as the composition of this non-linear correction and then the linear projection) so as to avoid interpolating pixel values twice. The reference image also undergoes this correction without the linear preojection.
Reference image
This is the image which is used as a common reference to compute the transformations that send all the images of the sequence onto this particular one.
If not set manually, the reference image is chosen with the following criteria:
if the sequence has already been registered, it is the best image, in term of lowest FWHM or highest quality depending on the type of registration
Otherwise, it is the first image of the sequence that is not excluded.
To specify an image as the reference, you can:
Open the Frame selector, select the image to be set as the new reference and click the button Reference Image.
Use the command setref. For instance, if you want to set image #10 as the reference:
setref 10
Siril command line
setref sequencename image_number
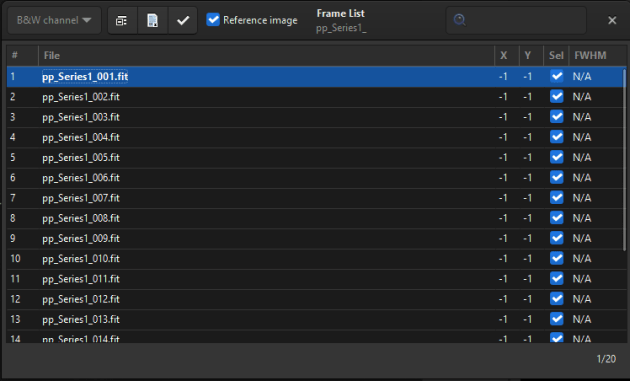
The frame list dialog. You can browse all images in the sequence.
During stacking, the reference image is used as the normalization reference as well, if normalization is activated.
Registration methods
Global registration
This is the preferred algorithm to align deep-sky images with sufficient overlap.
The global matching is based on triangle similarity method for automatically identify common stars in each image [Valdes1995]. Our implementation is based upon the program match from Michael Richmond. Then, RANSAC [Fischler1981] algorithm is used on the star lists to further reject outliers and determine the projection matrix. The robustness of the algorithm depends on the ability to detect the stars while avoiding false detections. Siril has a very elaborate star detection algorithm that avoids as much as possible to select objects that are not stars in the fastest possible time. The detection of the brightest stars is usually the most important. However, if there is a need to detect fainter stars, then the Dynamic PSF window can be used to adjust the detection parameters.
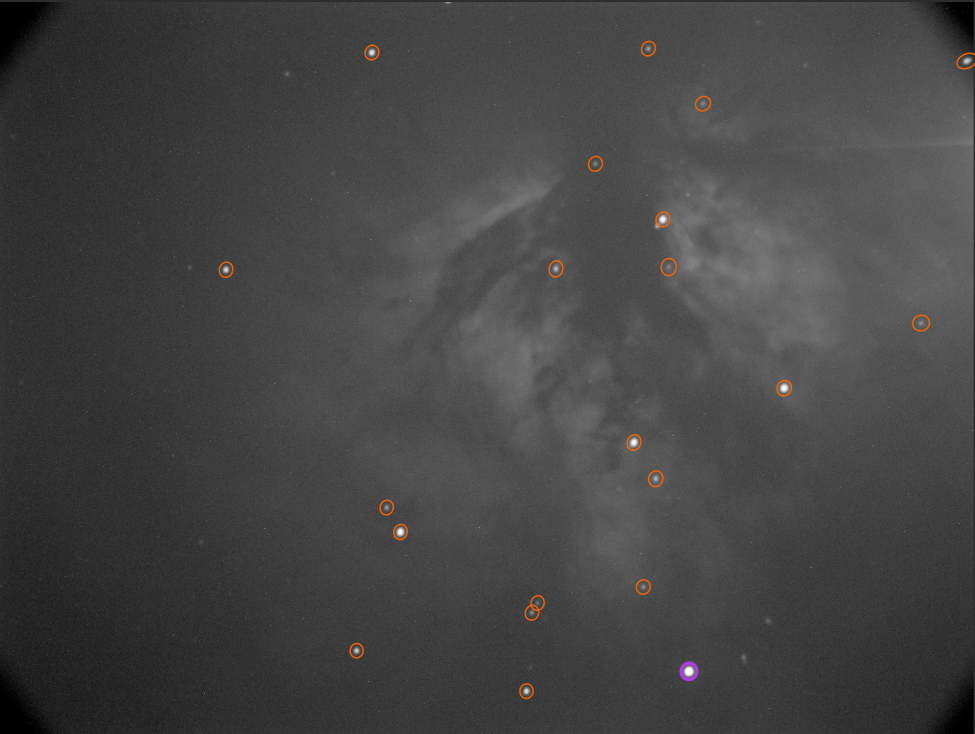
Automatic detection of stars in a single frame
There are some options associated with this alignment method.
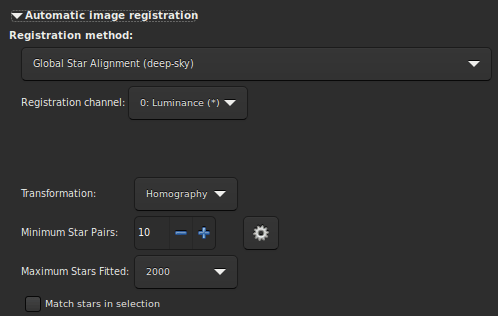
Global registration options
The Transformation dropdown menu allows to choose between different transformations.
Warning
The initial star matching uses triangle similarity algorithm, in consequence the minimum of star pairs must be at least of 3 for Shift, Similarity and Affine and of 4 for Homography.
Other registration options are:
The Minimum Star Pairs button sets the minimum number of star pairs a given frame can have in relation with the reference frame. If a given light frame has less star pairs, it will not be registered. To the right of this option is a button that opens the Dynamic PSF tool.
The option Maximum Stars Fitted defines the maximum number of stars to be searched for in each frame (default 2000). The larger this value, the more stars will potentially be detected, resulting in a longer detection but more accurate registration.
Use the option, Match stars in selection, if you want to perform the Global Star Alignment algorithm within the selected area in the reference image. If no selection is done, this option is ignored.
The Undistortion dropdown menu allows to choose between different corrections:
None
From image
From FITS/WCS file
From masters
*.wcs file that has distortion coefficients.Tip
For this last option From masters to work, you will need to have set a master distortion path in the preferences. To create a master file, go here.
The options at the bottom let you:
Filter out images that have been unselected from the sequence.
Choose between interpolation and drizzle for exporting the images. Those are the same as in the Output registration section, they are not further explained here.
Siril command line
register sequencename [-2pass] [-selected] [-prefix=] [-scale=]
register sequencename ... [-layer=] [-transf=] [-minpairs=] [-maxstars=] [-nostarlist] [-disto=]
register sequencename ... [-interp=] [-noclamp]
register sequencename ... [-drizzle [-pixfrac=] [-kernel=] [-flat=]]
2pass registration
To activate this option, simply tick the corresponding box after choosing Global registration in the method drop-down.
This performs only the first (of 2 passes), allowing the reference frame
to be chosen from detected star information instead of automatically choosing
the first frame of the sequence. The proposed options are similar to the
Global Registation
algorithm but this method does not create any sequences and all alignment
information is saved in the seq file.
During star detection, Siril sets a maximum of 2000 stars to be found (this can also be changed with the appropriate option). In case more than one image has reached the maximum star limits, the star lists of all images are screened again. A new minimum detection threshold is defined to be able sort the images by both number of stars detected and FWHM.
The star lists of all images are saved, the .fit(s) extension being replaced
by .lst. This allows to re-run the 2pass algorithm very quickly with different
parameters, say different transformation. In case the star detection have been
modified, the process detects these changes and re-run the analysis as required.
This registration must generally followed by Apply Existing Registation in order to apply the
transformation and build a new sequence, unless you have chosen to compute
Shift.
These lines perform a 2pass registration on a sequence named pp_light and applies it. The output is a sequence pp_light.
# Align lights in 2 passes
register pp_light -2pass
seqapplyreg pp_light
These lines perform a 2pass registration on a sequence named colors and applies it while cropping the output images to the minimum coommon area. The output is a sequence pp_colors. This can be useful before compositing mono images (the areas which are not common to all images are cropped).
# Align layers in 2 passes and crop away borders
register colors -2pass
seqapplyreg colors -framing=min
1-2-3 stars registration
When the images contain few stars, for example in the case of DSO Lucky Imaging images where the frame exposure is less than one second. It is possible that the global registration algorithm fails, even if you change the detection parameters in the Dynamic PSF window. It may then be interesting to make a manual detection of the stars you want to align. This is the interest of the 1, 2 or 3 star registration algorithm.
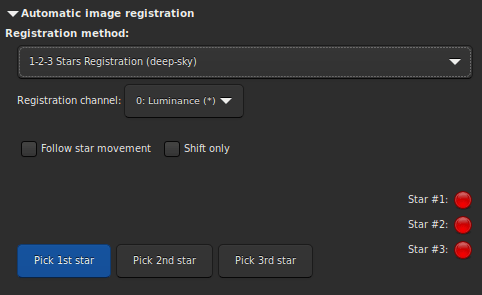
1-2-3 stars registration options
The principle of this method is to draw a selection area around a star and click on the Pick 1st star button, then so on.
If only one star is selected, only the translation between the images will be calculated. Therefore the Shift only button is automatically selected. The shift values are then storred in the
seqfile.If two or three stars are selected, then the rotation can be calculated and applied to create a new sequence. However, if the Shift only option is selected, which is not mandatory, only the shifts will be calculated.
The option Follow star movement use the position of the star(s) found in the previous image as new centre for the current image registration. This allows the selection area to be smaller, registration faster, and accounts for drift or images with a large number of stars.
Warning
Enabling this option requires the registration to not be parallelized, it will run on one CPU core only.
Image Pattern alignment (planetary-full disk)
This is a simple registration by translation method using cross correlation in the spatial domain.
This method is fast and is used to register planetary movies, in which constrasted information can be seen on large areas of the image. It can also be used for some deep-sky images registration. Nevertheless keep in mind that it is a single point alignment method, which makes it poorly suited for high definition planetary alignment. But, it does effectively anchor the images to stabilize the sequence. Simply draw a selection around the object (the planet for example) and make sure that its movement during the sequence is contained within the selection. Only the translation can be calculated with this method.

Pattern alignment options
KOMBAT
This method comes from the OpenCV library, a library widely used in Siril. They explain:
It simply slides the template image over the input image (as in 2D convolution) and compares the template and patch of input image under the template image. Several comparison methods are implemented in OpenCV. (You can check docs for more details). It returns a grayscale image, where each pixel denotes how much does the neighbourhood of that pixel match with template.
In practice, simply draw a selection around the object (the planet for example) and make sure that its movement during the sequence is contained within the selection. Only the translation can be calculated with this method.
Comet/Asteroid registration
The cometary registration tool works in a very simple way, in two steps.
With the frame selector, select the first image of the sequence, surround the comet nucleus, then click on the button Pick object in #1.
Then select the last image of the sequence, surround the nucleus of the comet, then click on the button Pick object in #2.
The comet velocity \(\Delta x\) and \(\Delta y\) is computed in pixel per hour if everything is ok.
Warning
The alignment of the comet must be done on images whose stars have been
previously aligned. Either via a new sequence, with the global alignment,
or by having saved the registration information in the seq file,
via a 2-pass or astrometric registration.
Note
To fully function, the images must have a timestamp.
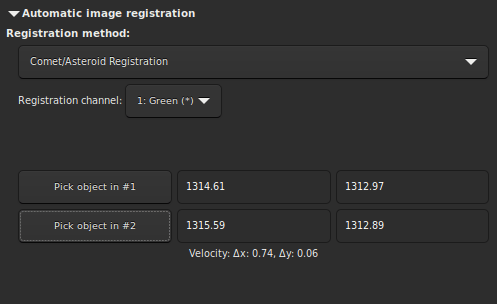
Comet registration options
Tip
If the PSF detection fails to detect an object, it will return the center of the box that was drawn. This can be handy if you want to align on an object that is not visible on your subs. Use the solar system object annotations to plot the position of an asteroid and draw a box around the marker to pick its position.
This method will ouput a new sequence file, with the sequence name prepended with
the prefix defined (comet_ by default). This does not however create
the new images but symlinks to the original images. For Windows users, please make
sure you have enabled developer mode,
otherwise, it will make hard copies. See also the note below this table.
Manual Registration
This last method of registration is very particular, which explains its separate position, and allows to align images manually. Of course, only the translation between images is allowed.
The first thing to do is to define two previews in the image. Clicking on the button Set first preview will initialize the first preview. You then need to click on an area of the image, ideally a star in the vicinity of an edge of the image to set the preview area. A click on the second button Set second preview allows to do the same on a second point.

It is very important to have a reference image already set with the Frame selector. By default, it is the first image. The user is free to choose the one he wants. It will be used as a reference layer, seen by transparency, to align the images manually with the numerical buttons. Then, browse the image one by one to apply the same method to the whole sequence.
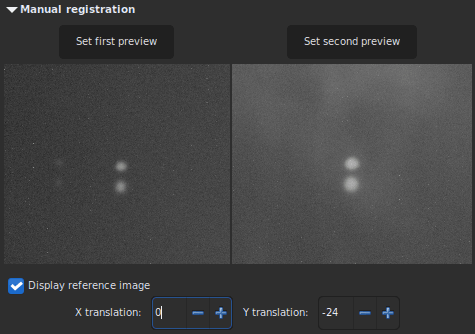
The Y-shift is too large, same stars on different frames do not overlap.
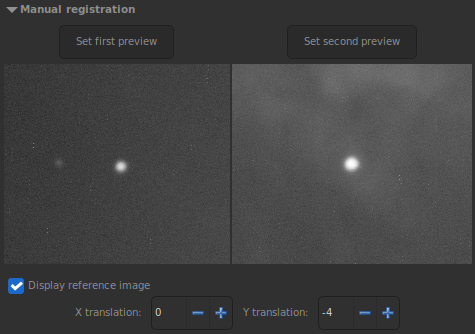
X- and Y-shift look fine. The current image is aligned to the reference one.
Astrometric registration
Introduced in version 1.3, this is the prefered mode for assembling mosaics or images with little overlap. It can also be useful to register stacks issued from different set-ups (different optics, different cameras, different field of views etc...).
It does not have an entry in the registration method drop-down as the information to export the registered images has already been computed when platesolving the sequence. All you need to do is to Apply Existing Registation.
Undistortion will be applied as defined when platesolving the sequence, meaning if the images were plate-solved using a SIP order larger than 1, then undistortion will automatically be included. Unless you have a perfectly optically flat field, it is usualy a good idea to platesolve using SIP, as shsown below, with and without distortion correction.

Effect of undistortion on two overlapping panels after registration
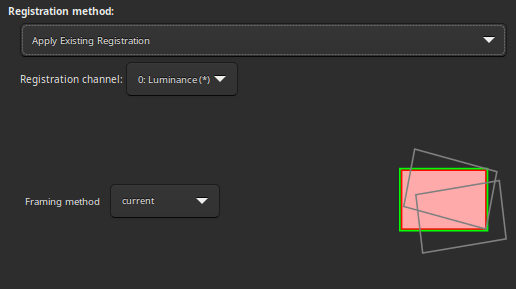
Apply Existing registration
This is not an algorithm but rather a commodity to apply previously computed registration data stored in the sequence file. The interpolation method can be selected in the Output Registration section. You can also use image filtering to avoid saving unnecessary images, as in stacking Image rejection. There is also a Drizzle option to apply registration using Drizzle instead of interpolation. See the Drizzle section for details.
Four framing methods are available:
 : current uses the current reference image. This is the default behavior.
: current uses the current reference image. This is the default behavior. : maximum (bounding box) adds a black border around each image as required
so that no part of the image is cropped when registered.
: maximum (bounding box) adds a black border around each image as required
so that no part of the image is cropped when registered. : minimum (common area) crops each image to the area it has in common with
all images of the sequence.
: minimum (common area) crops each image to the area it has in common with
all images of the sequence. : center of gravity determines the best framing position as the center of
gravity (cog) of all the images.
: center of gravity determines the best framing position as the center of
gravity (cog) of all the images.
Tip
Introduced in Siril 1.3, max mode does not export images with black borders,
that encompass the full resulting image. The images are exported with the
necessary projection and the relative shifts required to compose the final image
is kept in the the resulting seq file.
Estimate button will launch the framing computation, without actually exporting the images. This information can be interesting to know in advance the size of the exported images. This accounts for the framing method selected and the scaling factor chosen in the Output Registration.
When pressing Estimate, the console will show an output like this:
Output image: 7893 x 5254 pixels (assuming a scaling factor of 1.30)
Apply Existing registration options
Siril command line
seqapplyreg sequencename [-prefix=] [-scale=] [-layer=] [-framing=]
seqapplyreg sequencename ... [-interp=] [-noclamp]
seqapplyreg sequencename ... [-drizzle [-pixfrac=] [-kernel=] [-flat=]]
seqapplyreg sequencename ... [-filter-fwhm=value[%|k]] [-filter-wfwhm=value[%|k]] [-filter-round=value[%|k]] [-filter-bkg=value[%|k]] [-filter-nbstars=value[%|k]] [-filter-quality=value[%|k]] [-filter-incl[uded]]
[-filter-fwhm=value[%|k]] [-filter-wfwhm=value[%|k]] [-filter-round=value[%|k]] [-filter-bkg=value[%|k]]
[-filter-nbstars=value[%|k]] [-filter-quality=value[%|k]] [-filter-incl[uded]]
Output Registration
This frame contains all the output elements for the sequence. You can choose between Interpolation and Drizzle to export the images.
Warning
They may not be both available depending on the nature of the input sequence:
for mono sequences, both Interpolation and Drizzle may be selected
for CFA sequences (undebayered color images), only Drizzle is available
for RGB sequences (debayered color images), only Interpolation is available
Both methods share the options:
Scaling, a value between 0.1 and 2, that is used to rescale the output images.
Prefix, the prefix that will be preprended to form the exported sequence name (defaults to
r_).
Interpolation
Tthe pixels of the resulting images are interpolated by an algorithm that is left to the user's choice. There are 5 possible interpolation algorithms, plus a None option:
Nearest Neighbor
Bilinear
Bicubic
Pixel Area Relation
Lanczos-4
None
The best efficient interpolation methods are generally bicubic and Lanczos-4 (used by default). However, they usually require the Clamping interpolation option to be enabled to avoid ring artifacts around the stars, which makes the interpolation operation twice as slow. We still enable it by default because it gives a significant improvement in resolution, with often a 8% smaller in FWHM compared to Siril 1.0 default method of pixel area. It is possible the clamping is not useful for your images, we recommend you to compare the results with your images.
The special case of None is reserved for the case of global registration and Apply Existing registration. If you want to export or save a sequence that contains only translation, without using interpolation (so as not to modify the pixel values), you should select None.

Output options for interpolation
Drizzle
The button Drizzle activates the drizzle algorithm for the processing of this sequence. See the Drizzle section for details.
Warning
The counterpart of this technic is that the amount of memory and disk space needed to create and process drizzled images is multiplied by the square of the Drizzle scale factor.

Output options for drizzle
Astrometric solution of the registered images
When registered images are exported, they inherit the astromertic soluion of the reference image if any. Otherwise, their previous solution is wiped. Obviously, the new solution for each image accounts for the transformations it has undergone through the registration process.
In case a distortion solution is found in the reference image but no undistortion
was applied when computing the transformations - for instance if you have not
selected any Distortion from the drop-down in global or 2-pass methods,
a warning will be displayed in the Console. The distortion information will be kept
in the registered images. In case they are significant, you may see their effect
when stacking. In which case, you will need to register again using a distortion
specification.
References
Fischler, M. A., & Bolles, R. C. (1981). Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography. Communications of the ACM, 24(6), 381-395.
Valdes, F. G., Campusano, L. E., Velasquez, J. D., & Stetson, P. B. (1995). FOCAS automatic catalog matching algorithms. Publications of the Astronomical Society of the Pacific, 107(717), 1119.