Empilement
La dernière étape de prétraitement à effectuer avec Siril consiste à empiler les images. L'empilement d'images est une technique utilisée en astrophotographie pour améliorer la qualité et le détail d'une image en combinant plusieurs photographies en une seule image composite. Le processus consiste à prendre plusieurs images du même objet, puis à les aligner et à en faire la moyenne afin de réduire le bruit et d'augmenter le rapport signal/bruit. Il en résulte une image finale moins bruitée, plus détaillée et avec une plus grande plage dynamique qu'une simple exposition.
Méthodes d'empilement
Empilement par somme
Il s'agit de l'algorithme le plus simple : chaque pixel de la pile est additionné. L'augmentation du rapport signal/bruit (RSB) est proportionnelle à \(\sqrt{N}\), où \(N\) est le nombre d'images. En raison de l'absence de normalisation et de rejet, cette méthode ne doit être utilisée que pour le traitement des planètes.
Pour les images d'entrée à 8 ou 16 bits par canal, la somme est effectuée dans un entier de 64 bits avant d'être normalisée à la valeur maximale du pixel et sauvegardée comme un entier non signé de 16 bits ou dans un nombre à virgule flottante de 32 bits.
Cette méthode d'empilement devrait être utilisée pour les images d'entrée de 8 bits, car elle augmente la dynamique des images tout en les empilant, ce qui permet de discerner les caractéristiques. L'empilement avec une méthode moyenne ou médiane d'une telle séquence ne ferait que diminuer le bruit mais n'améliorerait pas la dynamique de l'image, le résultat étant toujours d'une profondeur de 8 bits.
Empilement par moyenne avec rejet des pixels déviants
Cette méthode d'empilement calcule une moyenne des pixels d'une pile après avoir exclu les pixels déviants et une effectue une normalisation facultative des images par rapport à l'image de référence. Comme pour l'empilement par somme, l'amélioration du rapport signal/bruit est proportionnelle à \(\sqrt{N}\). Il existe plusieurs façons de normaliser les images et plusieurs façons de détecter et de remplacer ou d'exclure les pixels déviants, comme expliqué ci-dessous.
Avertissement
Certains systèmes d'exploitation limitent le nombre d'images pouvant être ouvertes simultanément, ce qui est nécessaire pour les méthodes d'emnepilement par médiane ou moyen. Pour Windows, la limite est de 2048 images. Si vous avez beaucoup d'images, vous devez utiliser un autre type de séquence, décrit ici.
Panneau d'empilement par rejet de pixel
Méthodes de rejet
Percentile Clipping : C'est un algorithme de rejet de pixels en une étape, idéal pour les petits ensemble d'images (jusqu'à 6 images).
Sigma Clipping : Il s'agit d'un algorithme itératif qui rejette les pixels dont la distance par rapport à la médiane est supérieure à deux valeurs données en unités sigma (\(sigma\) low, \(\sigma\) high).
MAD Clipping : Il s'agit d'un algorithme itératif qui fonctionne comme le Sigma Clipping, sauf que l'estimateur utilisé est l'écart absolu médian (MAD). Cet algorithme est généralement utilisé pour le traitement d'images infrarouges bruitées.
Sigma Clipping Médian : Il s'agit du même algorithme que le Sigma Clipping, sauf que les pixels rejetés sont remplacés par la valeur médiane de la pile.
Winsorized Sigma Clipping : Cette méthode est très similaire à la méthode Sigma Clipping, sauf qu'elle est censée être plus robuste pour la détection des valeurs aberrantes, voir le travail de Huber [Peter2009].
Test de déviation extrême généralisé de Student [Rosner1983] : Il s'agit d'une généralisation du test de Grubbs qui est utilisé pour détecter une ou plusieurs valeurs aberrantes dans un ensemble de données univariées qui suit une distribution approximativement normale. Cet algorithme montre d'excellentes performances avec un grand ensemble de données de plus de 50 images.
Linear Fit Clipping [ConejeroPI] : Il ajuste la meilleure ligne droite (\(y=ax+b\)) de la pile de pixels et rejette les valeurs aberrantes. Cet algorithme fonctionne très bien avec les grandes piles et les images contenant des gradients de ciel avec des distributions spatiales et des orientations différentes.
Notez que pour les images CFA drizzle, vous pouvez avoir des difficultés à obtenir un rejet satisfaisant dans les canaux rouge et bleu avec certaines méthodes. Dans ce cas, la méthode de clipping MAD semble être la plus efficace.
Carte de rejet
L'option Créer cartes de rejet calcule et crée des cartes de rejet pendant l'empilement. Ce sont des images montrant combien d'images ont été rejetées pour chaque pixel de l'image résultat, divisé par le nombre d'images empilées. Si Fusionner L+H est coché, Siril ne crée qu'une seule carte de rejet qui sera la somme des cartes basse et haute.

Exemple de carte de rejet (L+H). On voit très clairement la trace d'un satellite qui a été retiré.
Filtrage/poids des images
La pondération permet d'attribuer un poids statistique à chaque image. Ainsi, les images considérées comme les meilleures contribueront davantage que celles considérées comme les moins bonnes. Quatre méthodes de pondération sont disponibles :
Nombre d'étoiles donne des poids aux images individuelles en fonction du nombre d'étoiles calculé lors de l'étape d'alignement.
Weighted FWHM pondère les images individuelles sur la base de la wFWHM calculée lors de l'étape d'alignement. Il s'agit d'une FWHM pondérée par le nombre d'étoiles dans l'image. Pour une même mesure de FWHM, une image avec plus d'étoiles aura une meilleure wFWHM qu'une image avec moins d'étoiles.
Bruit pondère les images individuelles en fonction des valeurs de bruit de fond.
Nombre d'images pondère les images individuelles en fonction de leur temps d'intégration.
Assemblage d'images
Available since Siril 1.3, this submenu allows to perform a smoother stitching between images with little overlaps. It is the first step of mosaic stitching which we plan to expand further in next releases.
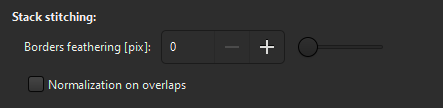
Panneau d'assemblage d'empilements
Chevauchement des contours applique un masque de lissage à chaque image lors de l'empilement. Le lissage s'effectue sur une distance de X pixels, X correspondant à la valeur que vous définissez via cette interface. Les masques sont mis en cache dans le sous-dossier
./cache.
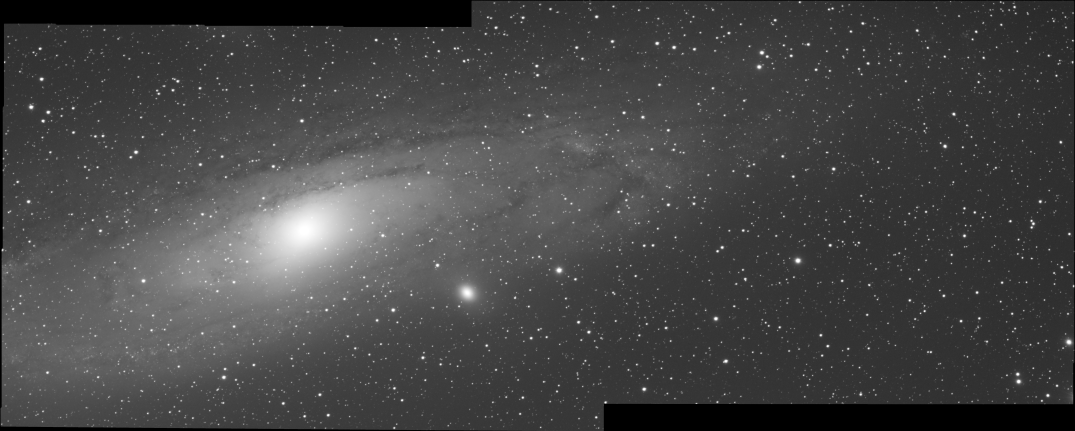
Effet de chevauchement des contours appliqué à une mosaïque 3x2 (négatif). Images par G. Attard
Normalization on overlaps will compute the normalization factors on the images overlaps instead of whole images. This is useful when images have little overlap and when the nature of the data in each tile is very different accross all images (some images with mostly nebulosity and others with mainly black sky). As it is longer to compute than regular normalization, you should try without ticking this option first. This feature is intended for stitching stacked mosaic tiles so it will throw a warning if you try to compute it for a long sequence (i.e. for subs acquired with a smart telescope in mosaic mode). It is only available if maximize framing is enabled.

Global vs overlap normalization on a 2x1 mosaic. Images courtesy of D. Huber
Théorie
The normalization on overlaps has been derived from the algorithm for gain compensation from [Brown2007]. The full write-up of the modifications is described in the contributors documentation.
Empilement médian
Cette méthode est principalement utilisée pour l'empilement des darks/flats/offsets. La valeur médiane des pixels de la pile est calculée pour chaque pixel.
L'augmentation du rapport signal/bruit est proportionnelle à \(0.8\sqrt{N}\) et est donc moins bonne que l'empilement par moyenne qui est généralement préféré.
Empilement par pixel maximum
Cet algorithme est principalement utilisé pour construire des images de traînées d'étoiles à longue exposition. Les pixels de l'image sont remplacés par des pixels aux mêmes coordonnées si l'intensité est plus grande.
Empilement du pixel minimum
Cet algorithme est principalement utilisé pour recadrer une séquence en supprimant les bordures noires. Les pixels de l'image sont remplacés par des pixels aux mêmes coordonnées si l'intensité est plus faible.
Méthodes de normalisation en entrée
La normalisation ajuste les niveaux de chaque image par rapport à l'image de référence. Cette opération est particulièrement utile pour l'empilement par moyenne avec rejet des pixels déviants, car il n'est pas très utile de rejeter des pixels si les images présentent des différences de niveau. Ces différences peuvent être dues à la nébulosité, au gradient de lumière causé par la lune ou les lumières de la ville, à la variation de la température du capteur, etc.
Cela tend à améliorer le rapport signal/bruit et c'est donc l'option utilisée par défaut avec la normalisation additive.

Panneau de normalisation des entrées d'empilement
Si l'un de ces cinq éléments est sélectionné, un processus de normalisation sera appliqué à toutes les images d'entrée avant l'empilement.
La normalisation fait correspondre l'arrière-plan moyen de toutes les images d'entrée, et la normalisation est appliquée par multiplication ou addition. Il faut garder à l'esprit que les deux processus aboutissent généralement à des résultats similaires, mais que la normalisation multiplicative est préférable pour les images qui seront utilisées pour la multiplication ou la division en tant qu'images flats.
La mise à l'échelle gère la dispersion en pondérant toutes les images. Cette opération tend à améliorer le rapport signal/bruit et par conséquent cette option est active par défaut avec a normalisation additive.
Normalisation |
Opération |
Cas pratique |
||
|---|---|---|---|---|
Aucun |
Aucune normalisation n'est appliquée. |
images dark/bias |
||
Additive |
Les valeurs moyennes du fond de ciel seront alignées par l'application d'opérations additives. |
|||
Multiplicative |
La division sera utilisée pour aligner les valeurs moyennes du fond de ciel. |
images flat |
||
Additive + Mise à l'échelle |
En combinaison avec la correspondance additive du fond de ciel, les images seront mises à l'échelle pour obtenir la correspondance de la dispersion. |
Images cible |
||
Multiplicative + Mise à l'échelle |
En combinaison avec la correspondance du fond de ciel par division, les images seront mises à l'échelle pour obtenir la correspondance de la dispersion. |
|||
Note
Les masters offset et dark ne doivent pas être traités avec la normalisation. Cependant, la normalisation multiplicative est recommandée pour les images flats.
Gardez à l'esprit que les deux processus aboutissent généralement à des résultats similaires, mais que la normalisation multiplicative est préférable pour les images qui seront utilisées pour la multiplication ou la division en tant qu'images flats.
Comme l'étape de calcul de la normalisation est généralement longue, puisqu'elle nécessite de déterminer toutes les statistiques de l'image, les résultats sont stockés dans le fichier seq. De cette façon, si l'utilisateur veut faire un autre empilement en changeant les paramètres de rejet, il sera exécuté plus rapidement. L'option Recalculer permet de forcer le recalcul de la normalisation.
Par défaut, Siril utilise des estimateurs IKSS de la position et de l'échelle pour calculer la normalisation. Pour les longues séquences, le calcul de ces estimateurs peut être assez intensif. Pour de tels cas, vous pouvez opter pour des estimateurs plus rapides (basés sur la médiane et l'écart absolu à la médiane) avec l'option Normalisation plus rapide. Bien qu'ils soient moins résistants aux valeurs aberrantes dans chaque image, ils peuvent tout de même donner un résultat satisfaisant par rapport à l'absence de normalisation.
Rejet des images
Il est également possible de rejeter un certain nombre d'images afin de ne sélectionner que les meilleures. Cela peut être très utile pour les techniques Lucky DSO où le nombre d'images dans une séquence est très élevé. On peut choisir entre % et k-\(\sigma\) pour soit conserver un pourcentage donné d'images, soit calculer le seuil admissible en utilisant le rejet k-\(\sigma\).

Panneau de rejet des images de l'empilement
Plusieurs critères sont disponibles :
toutes : toutes les images de la séquence sont utilisées pour l'empilement.
sélectionnées : utilise seulement les images qui n'ont pas été désélectionnées dans la séquence.
FWHM : images avec le meilleur calcul FWHM (alignement basé sur les étoiles seulement).
FWHM pondérée : c'est une amélioration de la simple FWHM. Cela permet d'exclure plus d'images suspectes en utilisant le nombre d'étoiles détectées par rapport à l'image de référence (alignement basé sur les étoiles seulement).
rondeur : images avec la meilleure rondeur en étoile (alignement basé sur les étoiles seulement).
fond de ciel : images avec les valeurs de fond du ciel les plus faibles (alignement basé sur les étoiles seulement).
nb étoiles : images avec le meilleur nombres d'étoiles détectées alignement basé sur les étoiles seulement).
qualité : images avec les meilleurs qualités (alignements planétaires DFT ou Kombat).
Résultat d'empilement
Si l'option Normalisation en sortie est cochée, l'image finale sera normalisée dans l'intervalle [0, 1] si vous travaillez en précision 32 bits, ou dans l'intervalle [0, 65535] sinon.
Avertissement
Cette option ne doit pas être cochée pour l'empilement des maîtres.
Si l'option Égalisation RVB est cochée, les canaux de l'image finale seront égalisés (uniquement pour les images en couleur).
If Maximize framing is checked, the output image will encompass all the images. Note this option is forced if the images have different sizes.
If Interpolation upscaling x2 is ticked, the images will be upscaled during stacking. Note this option is not always available.
Selecting Force 32b forces the stacked image to be saved as a float image irrespective of the bitdepth set in the Preferences.
Le résultat de l'empilement est enregistré sous le nom donné dans le champ texte. Il est possible d'utiliser l'interprétation d'entêtes pour construire le nom de fichier. Cocher la case Écraser permet au nouveau fichier créé d'écraser l'ancien s'il existe. Si ce dernier n'est pas coché mais qu'une image portant le même nom existe déjà, alors aucun nouveau fichier n'est créé.
Références
Peter J. Huber and E. Ronchetti (2009), Robust Statistics, 2nd Ed., Wiley
Juan Conejero, ImageIntegration, Tutoriel Pixinsight
Rosner, B. (1983). Percentage points for a generalized ESD many-outlier procedure. Technometrics, 25(2), 165-172.
Brown, M., & Lowe, D. G. (2007). Automatic panoramic image stitching using invariant features. International journal of computer vision, 74, 59-73.