Calibration
Une fois la séquence chargée, les images peuvent être calibrées, alignées et empilées. La calibration est une étape facultative, mais importante, qui implique des images de bias, des images darks et des images flats. L'étalonnage d'une séquence dans Siril ne peut se faire qu'avec un bias maître, un dark maître et un flat maître, qui doivent d'abord être créés à partir de leurs séquences.
Fichiers maîtres
Paramètres des fichiers maîtres de l'onglet Calibration
Bias
Citons A Glossary of CCD terminology pour expliquer ce qu'est une image bias :
Le niveau d'offset d'une image CCD est un décalage électronique induit artificiellement qui garantit que le convertisseur analogique-numérique (ADC) reçoit toujours un signal positif. Toutes les données CCD présentent un tel décalage qui doit être supprimé si l'on veut que les valeurs des données soient réellement représentatives des comptes enregistrés par pixel.
Pour utiliser les bias maîtres dans Siril, cliquez sur le bouton à droite de l'entrée de texte et parcourez vos fichiers pour sélectionner le bon maître. Vous pouvez même utiliser le master-bias d'une bibliothèque telle que définie dans les préférences.
Astuce
Les bias doivent être pris avec l'obturateur fermé et le temps d'exposition le plus court possible. En principe, cela correspond à une exposition de 1/4000 s sur les appareils photos numériques modernes.
Exemple d'un bias pris avec un Canon EOS 1100D. Ne vous fiez pas au signal du bias légèrement visible, l'image est auto-étirée et les différences d'amplitudes des signaux sont très exagérées.
Bias synthétique
Comme le signal d'offset est très uniforme sur les capteurs modernes, nous recommandons de le traiter comme une image à niveau constant. Cela présente l'avantage d'économiser de l'espace disque et de minimiser le bruit dans l'image finale. À cette fin, Siril dispose d'une fonctionnalité qui rend la chose très facile.
Lors du prétraitement de vos flats, au lieu de spécifier un masterbias, vous pouvez directement taper des expressions dans le sélecteur de dossier telles que :
=2048
ou si l'en-tête FITS contient le mot clé OFFSET,
=64*$OFFSET
Les signes = et $ sont obligatoires. Le niveau doit être donné en ADU (et non en flottant, même si vous travaillez en 32 bits).
Traduit dans le langage de script, cela s'écrit :
preprocess flat -bias="=64*$OFFSET"
La valeur 2048 est ici un exemple pris pour les caméras dont le master-bias a une valeur médiane de 2048 .En général, pour les appareils photos numériques, la valeur est proportionnelle à une puissance de 2. Dans notre exemple, \(2048 = 2^{11}\).
Pour plus de détails, veuillez vous référer au tutoriel sur les offsets synthétiques.
Dark
Les images darks contiennent le bruit thermique associé au capteur, le bruit étant proportionnel à la température et au temps d'exposition. Par conséquent, elles doivent être réalisées à peu près à la même température que les images lights. C'est la raison pour laquelle nous réalisons les images darks à la fin ou au milieu de la session d'imagerie.
Pour utiliser les dark maîtres dans Siril, cliquez sur le bouton à droite de l'entrée de texte et parcourez vos fichiers pour sélectionner le bon maître. Vous pouvez même utiliser le master-dark d'une bibliothèque telle que définie dans les préférences.
Astuce
Les darks sont réalisés au même temps d'exposition et ISO/Gain que les lights mais avec l'obturateur fermé.

Exemple d'une image dark prise avec un Canon EOS 1100D avec 300s d'exposition et à ISO 800.

Une animation montrant la suppression du signal thermique grâce à la soustraction du dark.
Optimisation des dark
L'option d'optimisation de l'obscurité est utile lorsque les images darks n'ont pas été prises dans des conditions optimales. Siril propose deux méthodes avec des approches différentes, accessibles via une liste déroulante.
Avec l'option Auto-évaluation, la soustraction du dark peut être optimisée de façon à ce que le bruit de l'image résultante (image claire moins image sombre) soit minimisé en appliquant un coefficient à l'image dark.
La seconde option, Utiliser exposition, est basée sur les temps d'exposition des images si elles ont été enregistrées dans les mots-clés FITS.
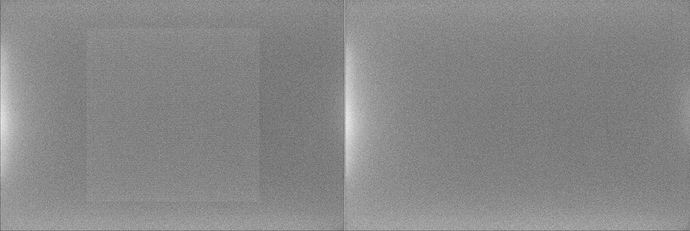
Voici un exemple de situation où l'utilisation de cette option est nécessaire. Les images ont été prises avec une caméra FLI ProLine 4240. Le master-dark utilisé provient d'une bibliothèque et a été réalisé avec une exposition de 600s. Les images individuelles, quant à elles, ont des expositions de 60s. Le master-dark présente une signature de signal très particulière et assez disgracieuse : la présence de 4 préamplificateurs dans la caméra est à l'origine d'un tel signal. Ce défaut est évidemment aussi présent dans l'image de la galaxie, et la calibration par les darks doit être méticuleusement effectuée pour obtenir une image exempte de tout défaut.
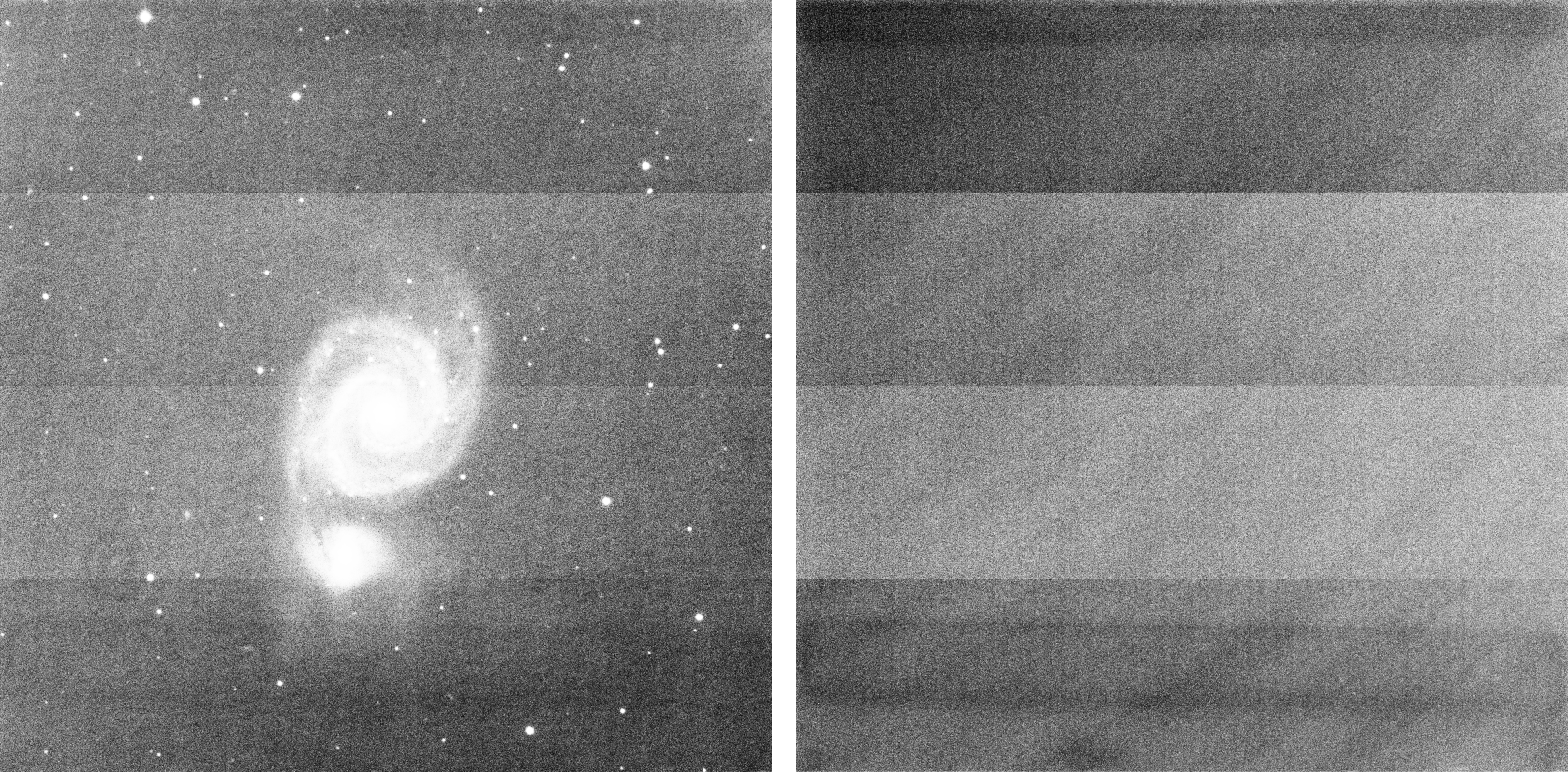
Il s'agit d'une image et du master-dark de la caméra FLI ProLine 4240. Vous pouvez voir 4 bandes très distinctes causées par les préamplificateurs, visible sur les deux types de fichiers. Les images sont affichées en mode égalisation d'histogramme, pour mettre en évidence les défauts.
Cependant, dans ce cas, si nous utilisons le flux de travail habituel, le résultat de la calibration sera très médiocre. En effet, le master dark n'a pas été pris dans les mêmes conditions d'exposition.
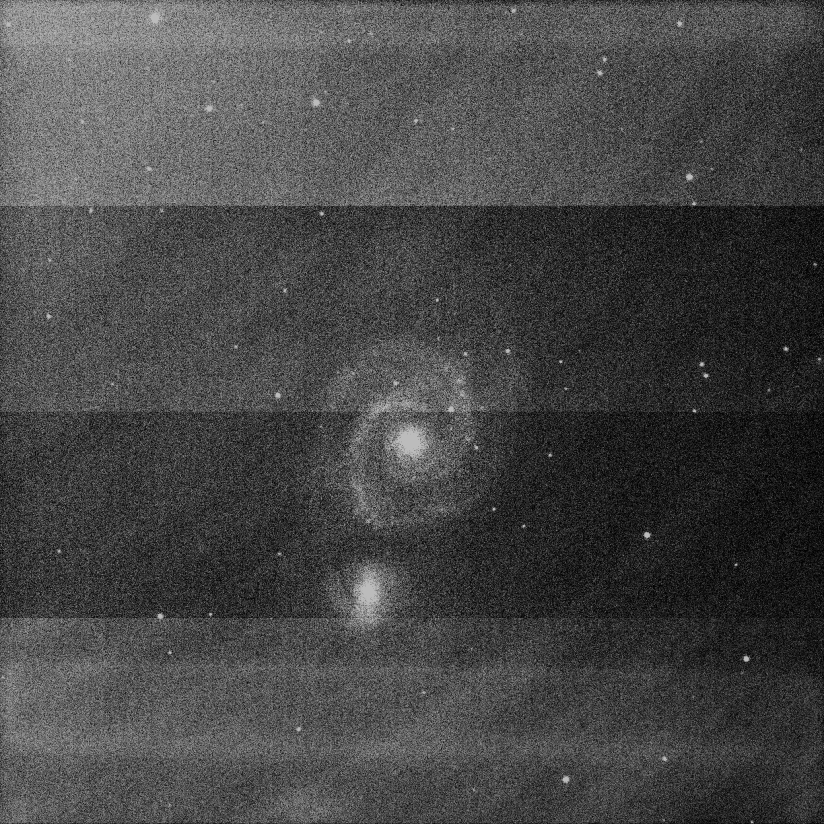
Avec le flux de travail classique, la calibration est médiocre et les défauts ne sont pas corrigés. L'image est affichée en mode d'égalisation d'histogramme, afin de mettre en évidence les défauts.
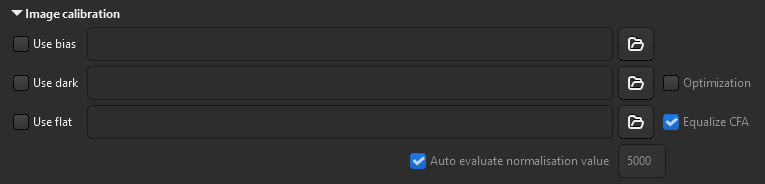
La solution est donc de soustraire le bias au dark, puis d'intégrer la soustraction du bias à celles des images, et de cocher la case d'optimisation des darks. Siril calculera automatiquement un coefficient à appliquer au fichier master-dark. Ici, il calcule 0.110, ce qui est très cohérent, puisqu'il correspond à la différence d'un facteur 10 entre les darks et les images (\(60 / 600 = 0.1\)).
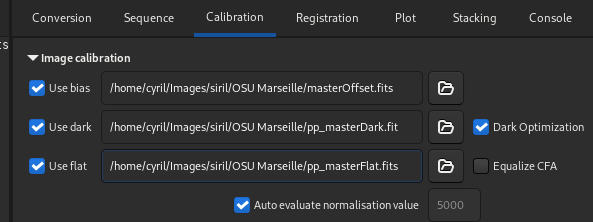
L'onglet calibration doit être complété comme il se doit dans un tel cas. Les master-flat et master-dark ont été calibrés par les bias.
10:34:58: Preprocessing...
10:34:58: Normalisation value auto evaluated: 0.313
10:34:58: 13230 corrected pixels (0 + 13230)
10:34:59: Dark optimization of image 0: k0=0.110
10:34:59: Saving FITS: file pp_M51SDSSr_00002.fit, 1 layer(s), 2048x2048 pixels, 32 bits

Grâce à l'optimisation des darks, la calibration est correcte. Le seul résidu visible est la frange du CCD dans le proche IR, qui ne peut être supprimée par la calibration. L'image est affichée en mode d'égalisation d'histogramme, afin de mettre en évidence les éventuels défauts.
Flat
Les télescopes n'éclairent généralement pas le détecteur de manière uniforme. En outre, la poussière sur les surfaces optiques et le capteur provoque des motifs plus sombres dans l'image résultante, et le capteur lui-même réagit différemment au nombre de photons qui frappent les différents photosites. Pour corriger ces effets, chaque image lumineuse doit être divisée par le master flat, qui devrait être la médiane des expositions individuelles d'une zone homogène et non saturée.
Pour utiliser les flates maîtres dans Siril, cliquez sur le bouton à droite de l'entrée de texte et parcourez vos fichiers pour sélectionner le bon maître. Vous pouvez même utiliser le master-flat d'une bibliothèque telle que définie dans les préférences.
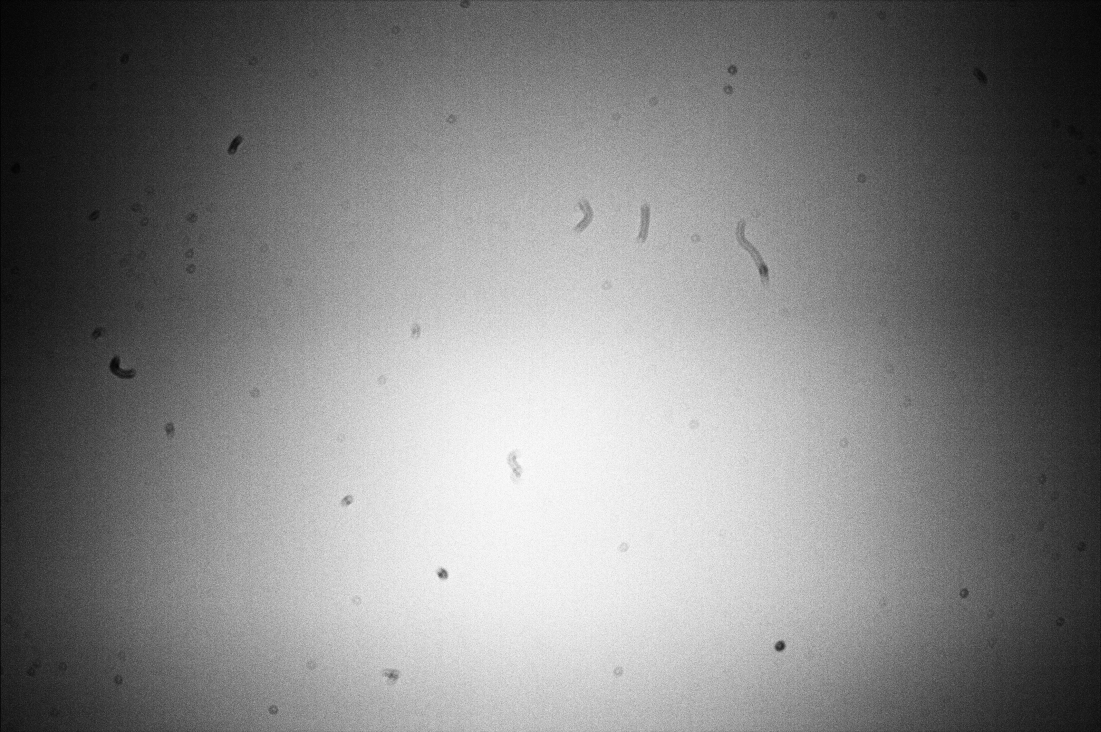
Exemple d'une image flat prise avec un Canon EOS 1100D. Les poussières présentes sur le chemin optique, et surtout sur le capteur, sont clairement visibles. Le vignettage (assombrissement des coins de l'image) est également très visible. Les défauts sont exagérés par le mode de visualisation. De plus, la commande grey_flat a été utilisée sur cette image pour faire disparaître le motif de Bayer.
Égalisation CFA
L'option Égaliser CFA égalise l'intensité moyenne des couches RGB d'une image flat CFA. Ceci est équivalent à l'utilisation de la commande grey_flat.
Ligne de commande Siril
grey_flat
Auto-évaluation de la valeur de normalisation
Si l'option Auto-évaluation de la valeur de normalisation est cochée, Siril évaluera automatiquement la valeur de normalisation. Cette valeur est la moyenne du master-flat étalonné avec le master-bias. Sinon, c'est la valeur indiquée dans la zone de texte qui sera prise en compte.
Calibration des images lights
La calibration des images light consiste à appliquer le maître biais , dark et flat aux images astronomiques afin d'éliminer le signal indésirable.
Avertissement
En aucun cas l'étalonnage ne réduit le bruit des images. Au contraire, il l'augmente. C'est pourquoi il est important de prendre autant d'images d'étalonnage que possible, telles que des darks, afin de minimiser la quantité de bruit dans les images.
Corrige les artefacts des fichiers X-Trans
Cette option Corrige les artefacts des fichiers X-Trans permet de corriger les pixels de l'Auto Focus Fujifilm X-Trans. En effet, en raison du système de mise au point automatique à détection de phase, les photosites utilisés pour la mise au point automatique reçoivent un peu moins de lumière que les photosites environnants. L'appareil photo compense ce phénomène et augmente les valeurs de ces photosites spécifiques, ce qui donne un carré visible au milieu des images darks/offsets. Cette option n'a aucun effet sur les images de type Bayer. L'option n'est activée que si un master-bias ou un master-dark est chargé et utilisé.
Artéfact X-Trans corrigé par l'algorithme de Siril
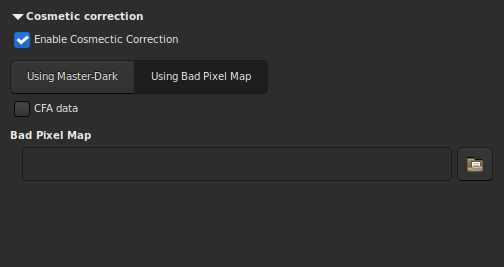
Correction cosmétique
La correction cosmétique est la technique utilisée pour corriger les pixels défectueux dans les images. En effet, tout capteur de caméra possède des photosites qui ne réagissent pas correctement à la réception des photons. Cela se traduit dans l'image par des pixels dont les valeurs sont très différentes de celles de leurs voisins les plus proches. Ces pixels sont appelés pixels chauds, si la valeur est beaucoup plus élevée, ou pixels froids lorsqu'elle est beaucoup plus faible. Siril propose deux algorithmes pour corriger ces pixels défectueux si l'option Activer la correction cosmétique est cochée.
Utiliser le Master-Dark
Cette méthode requière la présence d'un master-dark. Siril recherchera les pixels dont l'écart par rapport à la médiane dépasse x fois l'écart-type \(\sigma\). Cette valeur est ajustable pour les pixels chauds et froids.
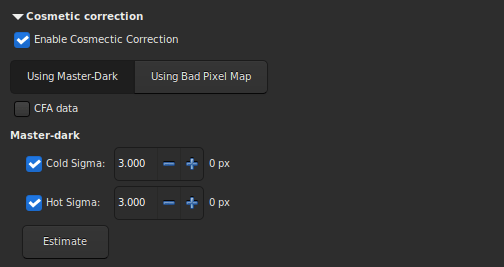
Il est possible d'estimer le nombre de pixels qui seront corrigés dans l'image calibrée en appuyant sur le bouton Estimer. Si la valeur du pixel corrigé est affichée en rouge, cela signifie que ce nombre dépasse 1% du nombre total de pixels de l'image. Dans ce cas, vous devez augmenter la valeur du coefficient ou décocher la correction correspondante. Si les images proviennent d'un capteur de couleur, il est nécessaire de cocher l'option CFA.
Utiliser la Carte des Mauvais Pixels
Cette autre méthode utilise un fichier qui contient les coordonnées des pixels défectueux. Ce fichier est un simple fichier texte qui peut initialement être créé avec la commande find_hot. La dernière ligne a été ajoutée à la main et corrige une colonne endommagée située à la position \(x = 1527\).
P 325 2855 H
P 825 2855 C
P 838 2855 H
P 2110 2855 H
P 2702 2855 H
P 424 2854 H
C 1527 0 H
Ligne de commande Siril
find_hot filename cold_sigma hot_sigma
P x y type vont fixer le pixel aux coordonnées (x, y), où "type" est un caractère optionnel (C ou H) spécifiant à Siril si le pixel actuel est froid ou chaud. Cette ligne est créée par la commande FIND_HOT, mais vous pouvez également ajouter manuellement quelques lignes :C x 0 type vont fixer la colonne défectueuse aux coordonnées x.L y 0 type vont fixer la ligne défectueuse aux coordonnées y.Ce fichier, qui peut être modifié à la main, doit être chargé comme une carte de mauvais pixels.
Enfin, si les images proviennent d'un capteur de couleur, il est nécessaire de cocher l'option CFA.
Séquence de sortie
Cette section regroupe les options qui peuvent être appliquées à la sortie.
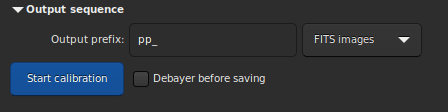
La zone de saisie Préfixe de sortie ajoute un préfixe aux images de sortie, afin de les identifier facilement. Par défaut, le préfixe est
pp_, ce qui signifie pre-processed (pré-traitée).La liste déroulante définit le type de séquence de destination.
Images FITS : une image FITS par image.
Séquence SER : un fichier SER pour toute la séquence (limité à 16 bits par canal).
Séquence FITS : un fichier FITS pour toute la séquence.
Dernière option, Dématricer avant sauvegarde. Cochez cette option si vous voulez appliquer un algorithme de dématriçage à vos images juste après qu'elles aient été calibrées. En faisant cela, vous sautez une étape manuelle qui peut prendre du temps.
Ligne de commande
Ligne de commande Siril
calibrate sequencename [-bias=filename] [-dark=filename] [-flat=filename] [-cc=dark [siglo sighi] || -cc=bpm bpmfile] [-cfa] [-debayer] [-fix_xtrans] [-equalize_cfa] [-opt[=exp]] [-all] [-prefix=] [-fitseq]
Ligne de commande Siril
calibrate_single imagename [-bias=filename] [-dark=filename] [-flat=filename] [-cc=dark [siglo sighi] || -cc=bpm bpmfile] [-cfa] [-debayer] [-fix_xtrans] [-equalize_cfa] [-opt[=exp]] [-prefix=]
Comprendre comment les flats corrigent les lights
Le but de cette section est de donner un peu plus de détails sur la façon dont les différents niveaux jouent un rôle dans la correction des lights par les flats.
Nous ne tiendrons pas compte ici des considérations relatives au bruit (encore une fois, le bruit ne disparaît pas avec la soustraction ou la division des maîtres, il diminue en calculant la moyenne de plusieurs réalisations du même processus aléatoire). Nous ne tiendrons pas compte non plus des configurations spatiales particulières telles que l'ampglow ou les poussières.
Si nous essayons de quantifier l'intensité des pixels d'arrière-plan dans les différentes images dont nous disposons, nous pouvons écrire les expressions suivantes :
avec, \(L\) pour Lights, \(D\) pour Darks, \(F\) pour Flats et \(O\) pout Bias.
Pour les images \(L\), la première partie est une composante d'illumination spatiale, c'est-à-dire \(a - b(x-\frac{W}{2})^2\). Nous avons choisi ici une variation quadratique avec une valeur maximale \(a\) au milieu du cadre de largeur \(W\), même autour du centre du capteur. Ce n'est pas la forme spatiale exacte du vignettage, mais c'est une assez bonne approximation pour comprendre comment il fonctionne. En plus de ce terme d'illumination spatiale, il existe un terme variant avec le temps d'exposition qui est généralement appelé courant d'obscurité (\(d_\text{rate} \times t_\text{lights}\)) mais qui ne dépend pas de la position du pixel sur le capteur. Enfin, il y a un pedestal, c'est-à-dire l'offset. Cet offset est présent dans toute image qui est prise, de sorte qu'on le retrouve dans toutes les expressions.
Les darks \(D\) n'étant pas éclairés, ils ne portent que le terme de courant d'obscurité, avec la même intensité que les images puisqu'ils sont tous les deux capturés avec la même durée, et le terme d'offset.
Les flats \(F\) ont également un terme spatial, proportionnel au terme trouvé dans les images "light". Le facteur \(K\), plus grand que 1, indique simplement que leur intensité est plus grande. Pour écrire cela, il suffit de supposer que les pixels répondent linéairement au nombre de photons qu'ils recueillent, ce qui est raisonnable. Nous aurions également pu écrire un terme de courant d'obscurité, proportionnel au temps d'exposition des flats. Mais si ce temps n'est pas important, nous pouvons supposer qu'il est négligeable. Si ce n'est pas le cas, cela signifie qu'il faut prendre des darks de flat ou au moins évaluer leur niveau.
Et enfin l'offset \(O\) mesure seulement le niveau de l'offset.
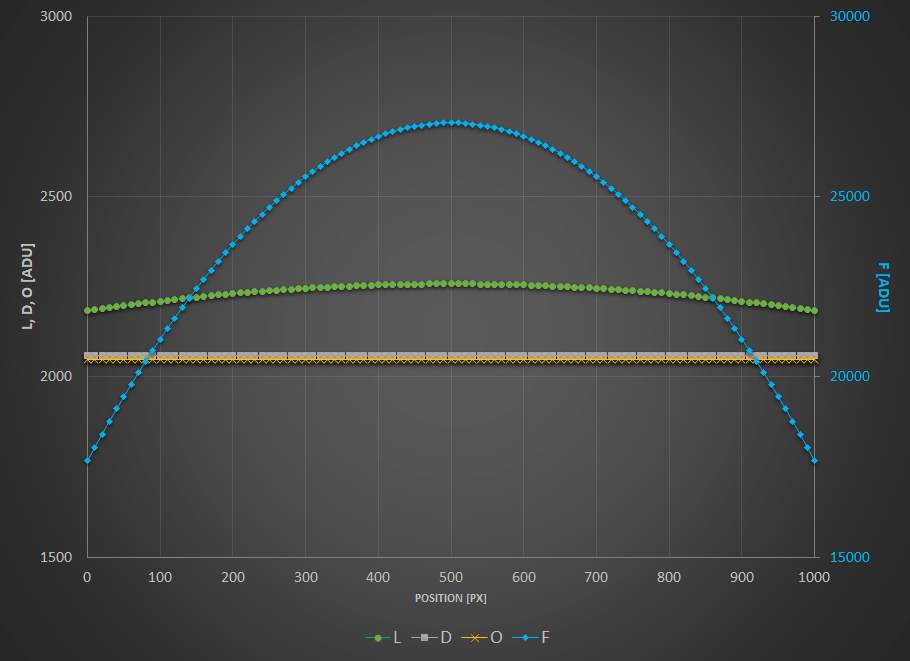
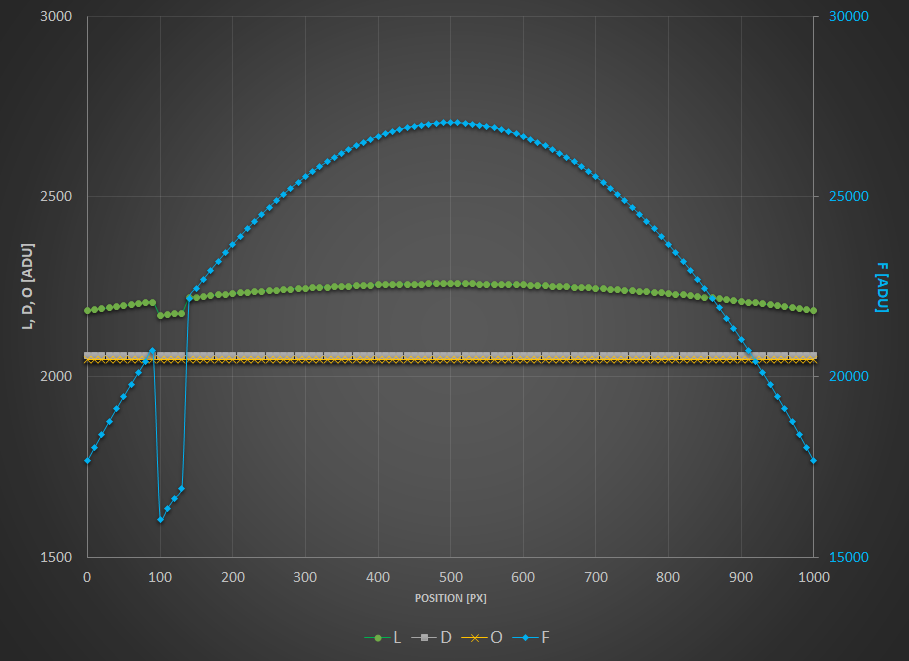
Pour visualiser ces niveaux, nous avons représenté ci-dessous ces expressions sous forme de courbes en fonction de la position sur une image et nous vous encourageons à faire de même et à jouer avec les entrées.
\(a = 200 \text{[ADU]}\)
\(b = 0.0003 \text{[ADU/px}^2\text{]}\)
\(d_\text{rate} = 1 \text{[ADU/s]}\)
\(t_{\text{lights}} = 10 \text{[s]}\)
\(o = 2048 \text{[ADU]}\)
\(W = 1000 \text{[px]}\)
Les valeurs \(L\), \(D\) et \(O\) en ADU sont données sur l'échelle de gauche tandis que \(F\) est sur l'échelle reporté à droite.
Qu'est-ce que l'étalonnage des butes ? Lorsque vous étalonnez vos brutes, vous effectuez l'opération suivante :
Le terme \(F-O\) désigne un flat dont vous avez soustrait le niveau d'offset (qu'il s'agisse d'un masterbias ou simplement d'un niveau). Il s'agit de l'opération effectuée avant l'empilement de votre masterflat. Et le terme \(L-D\) représente une image dont vous avez soustrait le niveau du courant de dark et l'offset, c'est-à-dire un masterdark. Si vous remplacez par les expressions ci-dessus, vous obtenez ce qui suit :
Il n'y a plus de terme de variation spatiale, vous avez mis vos "aplati" vos images ! Obtenir une valeur raisonnable en ADU (et non pas \(1/K\)) est ce que Siril fait lorsque vous cochez Evaluer automatiquement la valeur de normalisation dans l'onglet Calibration.
Et vous pouvez essayer avec n'importe quelle autre combinaison, aucune autre ne vous débarrassera des variations spatiales.
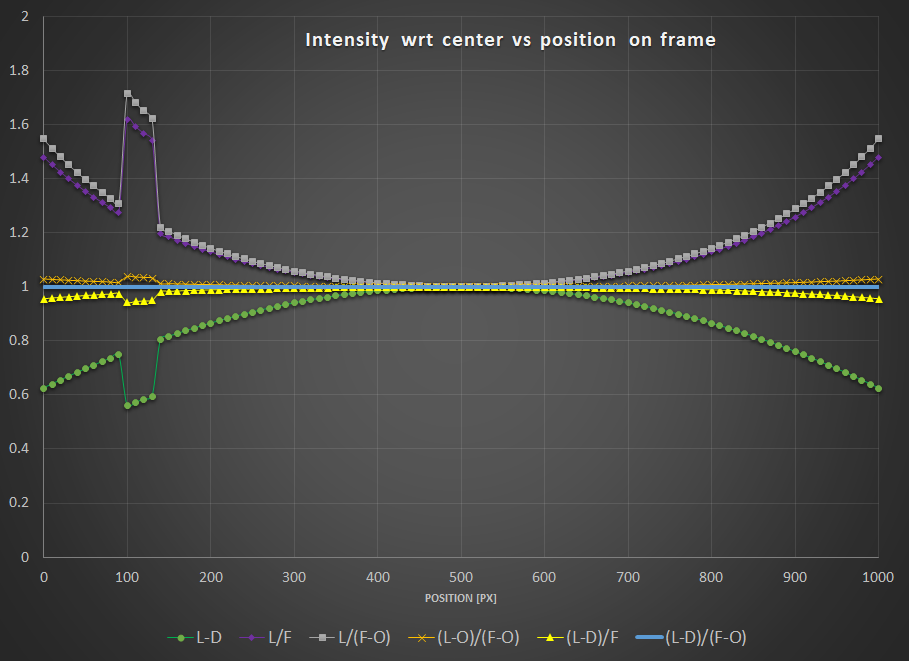
Pour illustrer cela, nous avons tracé ci-dessous le résultat de différentes combinaisons. Pour mettre tout sur la même échelle, tous les résultats sont normalisés pour avoir la même intensité de 1 au milieu du cadre. Les tests suivants sont présentés :
\(L-D\) : vous avez réalisé que les darks.
\(L/F\) : vous avez réalisé que les flats.
\(L/(F-O)\) : vous avez juste réalisé des flats et les avez corrigé d'un offset (un maître ou un synthétique).
\((L-O)/(F-O)\) : vous avez juste des flats corrigé par un offset. Mais vous avez aussi soustrait l'offset des light.
\((L-D)/F\) : vous avez réalisé des flats et des darks mais pas d'offsets.
\((L-D)/(F-O)\) : vous avez tout fait dans les règles de l'art.
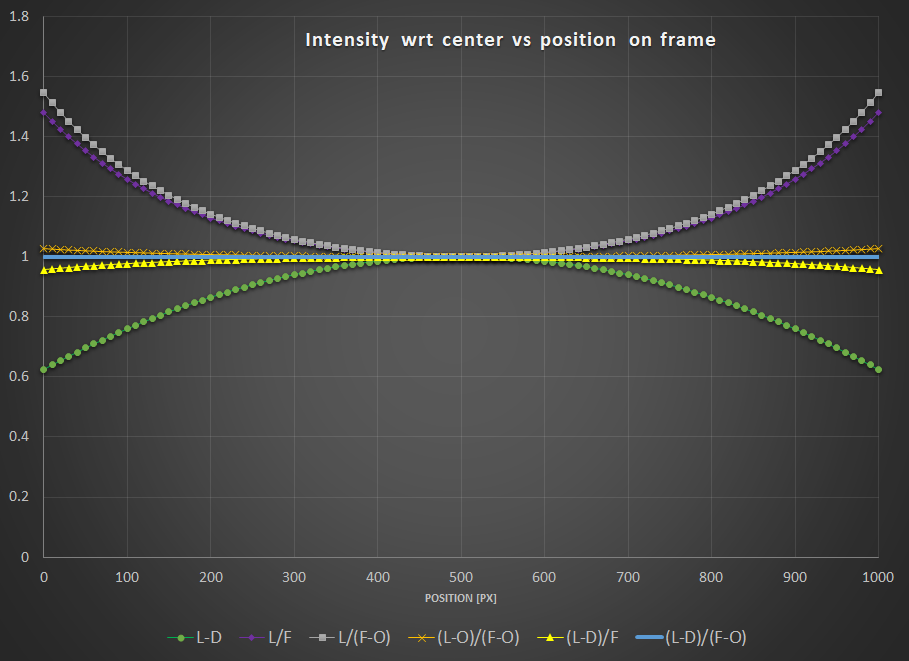
Il est intéressant de noter que :
\(L-D\) ne montre évidemment aucune correction pour le vignettage.
Les images \(L/F\) et \(L/(F-O)\) présentent une sur-correction ou un vignettage inverse.
Pour se rapprocher du résultat optimal, \((L-D)/F\) et \((L-O)/(F-O)\) montrent un champ presque plat. Cela dépend bien sûr de l'intensité du courant d'obscurité de votre capteur et du vignettage de votre train optique.
La calibration de référence donne un champ plat.
Les conclusions que nous pouvons tirer de ce qui précède sont les suivantes :
Il est préférable de corriger vos lights avec un offset (masterbias ou simplement un niveau) si vous n'avez pas réalisé de darks.
Mieux encore, si vous n'avez pas le temps de prendre une série de darks, cela vaut probablement la peine de prendre au moins un dark, de mesurer sa médiane, et de soustraire ce dark (synthétique) de vos lights. Bien sûr, cela ne corrigera pas l'ampglow ou ne permettra pas de corriger les pixels chauds, mais vos lights seront au moins plats !
Maintenant, qu'en est-il de la poussière... ?
Pour que vos flats corrigent aussi ces vilaines taches, la triste nouvelle est que vous devez aussi inclure toutes les images d'étalonnage dans l'équation. Nous avons ajouté un petit déficit ADU local dans les lights et les flats pour illustrer cet effet.
Comme vous pouvez le constater, seule la combinaison \((L-D)/(F-O)\) permet de s'en débarrasser.
Pour mieux illustrer les équations et les courbes ci-dessus, rien ne vaut un exemple concret. Toutes les photos ci-dessous sont reproduites avec l'aimable autorisation de G. Attard.

\(L-D\)

\(L/F\)

\(L/(F-O)\)

\((L-O)/(F-O)\)

\((L-D)/(F-O)\)
Résolution des problèmes de calibration
La calibration est une étape arithmétiquement très simple, qui ne peut échouer si les données d'entrée sont conformes à ce que l'on attend des images astronomiques.
Cependant, les utilisateurs sont régulièrement confrontés à des situations où les images calibrées ne sont pas correctes. Dans cette section, nous vous donnerons un aperçu des problèmes rencontrés et de la manière de les éviter.
Tout d'abord, l'outil statistique est une aide précieuse pour comprendre les problèmes, et est utilisé dans la majorité des cas pour les résoudre.
Lors de l'analyse des statistiques d'un dark maître, celui-ci doit d'abord être noir. En effet, ces images sont prises avec le bouchon fermé et il n'y a pas de raison que l'un des photosites soit privilégié. L'image doit donner l'impression d'avoir été prise par un capteur monochrome, la matrice de Bayer n'étant alors pas visible. Ci-dessous, voici un exemple où le master-dark a subi une balance des couleurs non souhaitée pour ce type d'image. En conséquence, il n'est plus noir et la matrice de Bayer est visible. Un tel dark est impropre à l'utilisation et doit être refait.
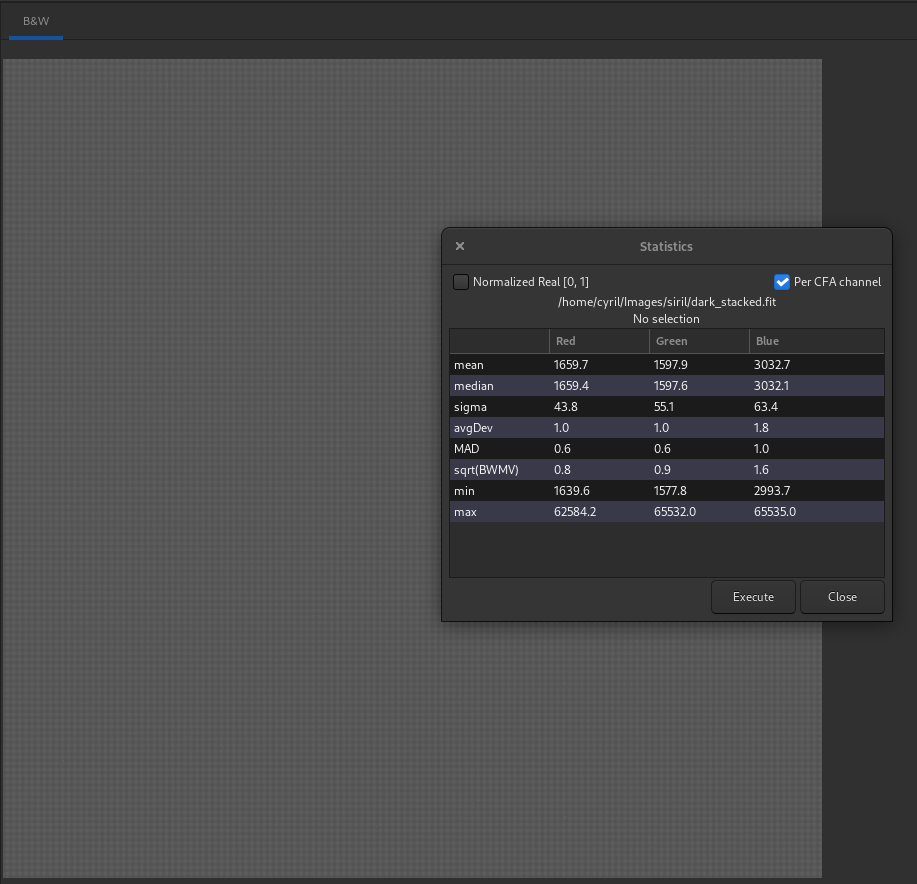
Un examen attentif des statistiques montre que la valeur médiane de chaque canal est différente, alors qu'elle devrait être identique (ou presque). En outre, le motif de Bayer est clairement visible.
Pendant la session de nuit, il est très important de régler la valeur OFFSET sur la même valeur pour toutes les images. En particulier, il est obligatoire d'avoir le même réglage pour les paires darks/lights et bias/flats. Si la première condition n'est pas respectée, des données importantes peuvent être perdues (écrêtage des pixels sur le côté gauche de l'histogramme). Si les deux conditions ne sont pas remplies, il est très probable que vos images ne pourront pas être correctement traitées avec le flat (voir la section ci-dessus).
Vérifier les niveaux des darks et des images : la valeur médiane des images doit être suffisamment élevée par rapport à celle du master-dark pour éviter de générer des images pleines de pixels avec des valeurs négatives.
Si vous avez utilisé les mêmes réglages pour les darks et bias, leurs valeurs médianes devraient être très proches les unes des autres (du moins avec une caméra refroidie). Dans le cas contraire, cela peut signifier que vous avez une fuite de lumière qui a affecté vos darks (les bias sont moins sensibles car ils sont exposées pendant un temps beaucoup plus court). Inspectez donc toujours votre master-dark pour voir s'il y a un gradient ou une zone plus claire au centre. Ce phénomène ne doit pas être confondu avec l'ampglow qui est normal pour certaines caméras.
Nous vous recommandons vivement de réaliser vos images de la même manière : même logiciel / même ordinateur ou astrobox / même format d'image. En effet, chaque logiciel peut utiliser ses propres conventions d'écriture, et les images peuvent ne plus être compatibles entre elles. On entend souvent parler d'utilisateurs qui font toutes leurs images avec une astrobox, et qui font les flats le lendemain directement avec leur reflex numérique. Dans ce cas, les images sont souvent de tailles différentes, ce qui rend la calibration impossible.
Une erreur souvent rencontrée lors de l'exécution d'un script est la présence d'images JPG dans l'un des dossiers d'entrée (darks/biases/flats/lights), le plus souvent des instantanés sauvegardés par le logiciel d'acquisition pour une navigation plus rapide. La conséquence de ce type d'erreur est que la calibration échoue et s'arrête, se plaignant que les images ne sont pas de la même taille. En fait, les images JPG étant déjà dématricées, elles possèdent trois canaux, alors que les images RAW n'en ont qu'un. Supprimez toutes les images JPG des dossiers d'entrée pour résoudre ce problème.
Vérifiez que le flat n'est pas surexposé. Les flats sont utilisés pour corriger les variations de sensibilité d'un pixel à l'autre dans le capteur. Si certains pixels sont surexposés, leur sensibilité réelle risque de ne pas être représentée avec précision, ce qui entraînera des corrections incorrectes au cours du processus d'étalonnage. Un flat surexposé est la garantie d'une calibration ratée.
Pour vérifier la présence de pixels surexposés, vous pouvez charger un flat et utiliser l'option pour afficher l'histogramme de l'image. L'image ci-dessous montre que l'un des pics est écrêté à droite. Par prudence, vous devriez toujours vérifier que la queue droite du pic le plus à droite n'est pas supérieure à 80 %, afin d'éviter d'entrer dans une zone où votre capteur pourrait devenir non linéaire.
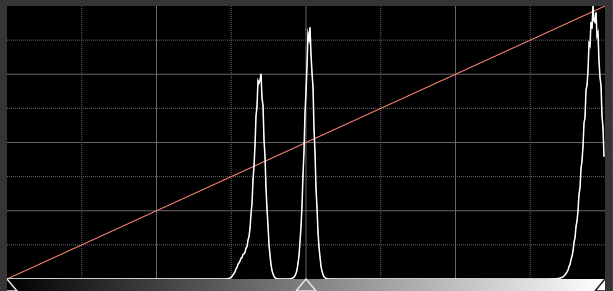
Saturation d'un flat. Lorsque cela se produit, cela signifie qu'il faut réduire le gain ou le temps d'exposition.